



 产品分类
产品分类
安全高效地将AMR集成到工业4.0运营中以获得最大效益
 177
177
 拍明芯城
拍明芯城
作者:Jeff Shepard
为了应对工业 4.0 操作中自主移动机器人 (AMR)(也称为工业移动机器人)的使用激增,自动化推进协会 (A3) 与美国国家标准协会 (ANSI) 最近发布了第二个增量AMR 安全标准:ANSI/A3 R15.08-2,其中详细介绍了在站点中集成、配置和定制 AMR 或 AMR 群的要求。一项基本要求是按照 ANSI/ISO 12100 或 ANSI B11.0 进行风险评估。新标准是对之前发布的 R15.08-1 的补充,该标准专注于 AMR 的安全设计和集成。
R15.08 系列标准建立在早期的 ANSI/工业卡车标准开发基金会 (ITSDF) B56.5 自动引导工业车辆 (AGV) 安全标准的基础上。新标准根据包含的特定功能和特性识别三类 AMR。
本文简要比较了 AMR 和 AGV、ANSI/ITSDF B56.5 和国际标准组织 (ISO) 3691-4 与 ANSI/A3 R15.08。然后,它回顾了 ANSI/国际标准组织 (ISO) 12100 和 ANSI B11.0 中概述的风险评估策略、它们与 AMR 的关系以及它们如何集成到 R15.08-2 中。接下来,它回顾了 R15.08-2 中定义的三类 AMR,最后介绍了 AMR 集成的实际考虑因素,包括如何实施测绘和调试、如何管理 AMR 车队以及如何为 AMR 提供新的机遇使用欧姆龙自动化和西门子的示例,使用仿真和数字孪生进行虚拟调试。
AGV 只能沿着预定且标记的路径行驶。它们没有独立的导航能力。如果遇到障碍物,它们就会停下来,等待障碍物被移除,然后再沿着固定路径前进。 AMR 包括独立的导航系统,可以改变路径并绕过障碍物(图 1)。由于这些差异,AGV 更适合相对稳定和不变的环境,而 AMR 支持更灵活和可扩展的部署,例如工业 4.0 运营所需的部署。
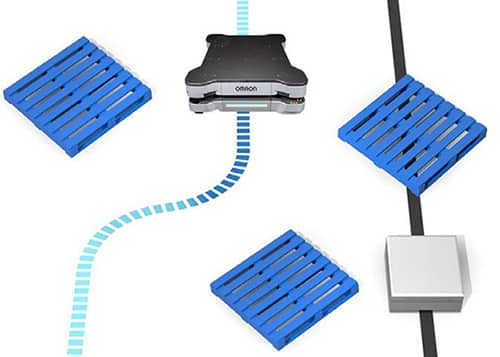
图 1:AMR(左)绕过障碍物导航,而 AGV(右)在到达障碍物时停止。 (图片来源:欧姆龙)
标准演变
一些 AMR 标准是从之前为 AGV 和固定机器人制定的标准演变而来的。例如,EN 1525:1997 是为 AGV 制定的,随后未经修改就应用于 AMR。较新的 ISO 3691-4 标准涵盖 AGV,并有专门针对 AMR 的部分。
ANSI/ITSDF B56.5是引导工业车辆、无人引导工业车辆以及有人工业车辆自动化功能的安全标准;它不涵盖 AMR。较新的 ANSI/RIA R15.08 是在工业环境中使用 AMR 的安全标准。它基于安全使用固定机械臂的 R15.06 标准并对其进行了扩展。
另一个重要标准是 EN ISO 13849,它定义了各种类型设备的安全性能级别 (PL)。从PLa到PLe共有五个级别,要求越来越严格。 AGV 和 AMR 制造商必须达到 PLd 安全性,确保在发生单一故障时持续安全运行,即通过使用冗余系统。
ANSI/A3 R15.08-2 要求对集成和部署 AMR 进行风险评估。 ISO 12100 和 ANSI B11.0-2010 定义的风险评估非常相似,但并不完全相同。 ISO 12100 针对原始设备制造商,而 ANSI B11.0 更关注机械和最终用户安全。这两个标准的风险评估基础相似。
风险评估
风险评估是一种高度结构化的分析,旨在达到可接受的风险水平。它认识到没有任何系统或环境是完美的;固有风险可以管理,但无法消除。它首先确定机器运行的限制,并识别机器在接近或超出这些限制运行时可能出现的危险。
接下来是风险评估,它着眼于每种危害可能造成的危害严重程度及其发生的可能性。发生可能性较低的非常严重的危险可能会获得与发生可能性较小但结果不太严重的危险类似的排名。所有已识别的风险都会经过评估和排名,以确定风险降低工作的优先顺序。风险评估可以是一个迭代过程,识别最严重的风险并降低其发生的概率和/或其结果的严重性,直到达到可接受的残余风险水平(图2)。
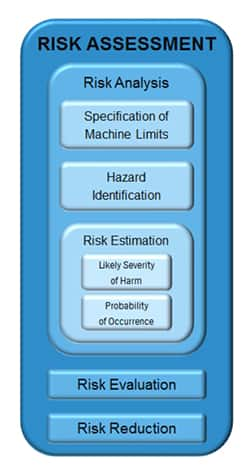
图 2:风险评估的关键组成部分包括风险分析、评估和降低。 (图片来源:SICK)
AMR 课程
R15.08 识别三种类型的 AMR:
Type A: AMR platform only. In contrast with AGVs, type A AMRs can function as independent systems without requiring environmental changes. They can include optional features like a battery management system, the ability to independently locate a charger and recharge its battery, the ability to integrate with centralized fleet management software, etc. Type A AMRs are most often used to move materials around a factory or warehouse.
B 型:A 型 AMR,添加了非机械手的被动或主动附件(图 3)。典型的附件包括输送机、辊道、固定或可移动的周转箱、起重装置、视觉系统、称重站等。B 型 AMR 可用于更复杂的物流任务。视觉系统可用于产品检查和识别、零件称重(或估计数量)等。

图 3:带有滚轮台附件的 B 型 AMR。这还显示了所有三种类型的 AMR 所共有的典型导航和安全系统。 (图片来源:欧姆龙)
C 型:A 型 AMR,添加了机械手。操纵器可以是具有三个或更多个运动轴的机械臂。 C 型 AMR 可设计为与人类一起工作的协作机器人 (cobot)。他们还可以是机器服务员,执行拾取和放置操作,完成复杂的检查任务,在农业环境中进行收割和除草等。一些设计可以从一个地方移动到另一个地方,并在每个站点执行不同的任务。
调试、测绘和跟随灯光
所有三种类型的 AMR 均旨在简化部署。与需要大量基础设施安装的 AGV 相比,AMR 部署无需任何施工,并且编程需求也可以降至最低。基本调试过程分为四个步骤(图 4):
AMR 交付时已安装所有必需的软件;第一个任务是安装电池并为其充电。
映射至关重要,可以手动或自动实现。对于手动测绘,技术人员控制 AMR 并将其带到设施周围,以便它了解环境。激光制导 AMR 可以每分钟自动扫描 1,000 平方英尺,以创建捕获邻近区域所有特征的地图,并将生成的地图无线发送到中央计算机。在这两种情况下,都可以使用虚拟路线和禁线来定制地图,以确保安全操作,并且可以在 AMR 车队之间共享。
设定目标包括确定上车和下车地点。
任务分配是最后一步,包括调度和协调车队中的各种 AMR,以及与企业资源规划 (ERP)、制造执行系统 (MES) 和仓库管理系统 (WMS) 的集成。
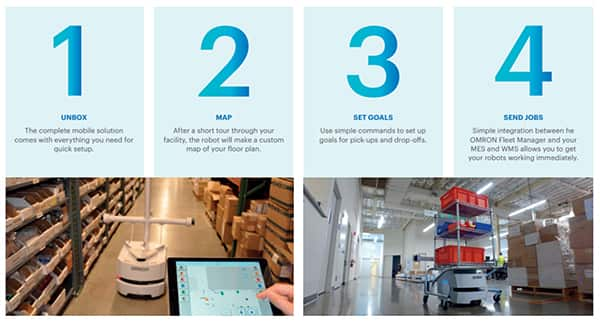
图 4:AMR 交付时已安装完整的软件,可以快速调试并集成到生产环境中。 (图片来源:欧姆龙)
除了使用激光扫描绘制设施地图外,一些欧姆龙 AMR 还使用摄像头来检测和绘制头顶灯的位置。它创建“光照图”并将其与标准“楼层图”叠加。
激光定位可以在一定程度上容忍地面环境的变化。假设超过 80% 的功能发生变化,例如,在货运码头上,托盘或滚动车不断改变位置。在这种情况下,激光定位的用处不大,而添加光图可以提高导航的可靠性。使用光照图还使 AMR 能够更轻松地在大型设施中的广阔开放区域中导航。
管理机器人车队
对机器人车队的有效管理可以倍增使用 AMR 的效益。它可以支持混合类型 AMR 的集中控制和协调操作,并提供最大限度提高运营效率所需的数据和分析。 AMR 车队管理系统的一些常见功能包括:
优化的任务分配基于车队中每个机器人的能力、它们当前的位置以及对其下一次任务的预期。
交通管理包括安排接送地点和时间以实现最高效率,并通知机器人目的地变化或新障碍物,使它们能够重新计算路径以实现最高效率和安全。
充电管理跟踪车队中每个机器人的电池充电水平,从而实现主动充电并最大限度地延长正常运行时间。
协调整个车队的软件更新,以确保每种类型的机器人都可以使用最新版本。
企业集成将车队管理软件连接到 ERP、MES 和 WMS 系统,以便可以实时自动向车队分配和安排作业。
虚拟调试
数字孪生和仿真软件的结合可实现虚拟调试。在这种情况下,数字孪生是 AMR 的虚拟表示。数字孪生可用于虚拟验证单个 AMR 和 AMR 车队的性能。虚拟调试使用机器人仿真软件将 AMR 的数字孪生与周围环境的数字孪生相结合(图 5)。

图 5:AMR 数字孪生可以虚拟插入到模拟工厂环境中进行虚拟调试。 (图片来源:西门子)
AMR虚拟调试还可用于集成和协调来自多个制造商的机器人的操作。在虚拟调试过程中,工程师可以快速高效地创建多个场景来验证整个系统的正常运行,而不仅仅是孤立的AMR。
虚拟安全测试和调试也可以通过数字孪生和仿真来实现。虚拟 AMR 可以承受异常情况,以测试各种突发事件并确保安全协议的正常运行。
实现虚拟调试的能力可以加快AMR车队的部署速度。部署后调试物理AMR队列既具有挑战性又耗时。它会导致停工并对设施的生产力产生负面影响。虚拟调试不会造成停工,用户可以放心 AMR 将在现实世界中按预期运行。
结论
AMR 部署在各种工业 4.0 安装中变得越来越普遍。 AMR 的标准格局正在不断发展,以满足安全高效地将 AMR 或 AMR 车队集成、配置和定制到站点的要求。根据 ANSI 和 ISO 标准,风险评估绩效是新标准中的一项关键要求。随着使用数字孪生和仿真的虚拟调试的出现,AMR 调试工具也在不断发展。
这是两部分系列中的第一部分 ,重点介绍最近发布的 R15.08-2 标准对 AMR 安全、风险评估和调试的影响。第二篇文章是为 R15.08-3 的发布而写的,该版本目前正在开发中,将讨论 AMR 中的传感器融合主题。
责任编辑:David
【免责声明】
1、本文内容、数据、图表等来源于网络引用或其他公开资料,版权归属原作者、原发表出处。若版权所有方对本文的引用持有异议,请联系拍明芯城(marketing@iczoom.com),本方将及时处理。
2、本文的引用仅供读者交流学习使用,不涉及商业目的。
3、本文内容仅代表作者观点,拍明芯城不对内容的准确性、可靠性或完整性提供明示或暗示的保证。读者阅读本文后做出的决定或行为,是基于自主意愿和独立判断做出的,请读者明确相关结果。
4、如需转载本方拥有版权的文章,请联系拍明芯城(marketing@iczoom.com)注明“转载原因”。未经允许私自转载拍明芯城将保留追究其法律责任的权利。
拍明芯城拥有对此声明的最终解释权。
相关资讯
:
基于Xilinx XCKU115的半高PCIe x8 硬件加速卡设计方案

图像传感器在汽车、工业和边缘AI的应用动向

基于RFID技术的智能档案管理系统设计方案

如何确保工业物联网设计符合ISA/IEC安全标准

基于LPC55S69+i.MX 8M的快速灵活EV充电系统解决方案

如何利用物质连接智能家居自动化的孤岛

















 2012- 2022 拍明芯城ICZOOM.com 版权所有 客服热线:400-693-8369 (9:00-18:00)
2012- 2022 拍明芯城ICZOOM.com 版权所有 客服热线:400-693-8369 (9:00-18:00)


