



 产品分类
产品分类
工业控制之编码器芯片方案浅析
 221
221
 拍明芯城
拍明芯城
编码器是对旋转角度和线性位移进行编码的传感器,搭配电机广泛应用在工业控制领域。检测旋转的编码器称为旋转编码器,检测线性位移的编码器称为线性编码器。为了快速,准确地控制工业机器人,必须实时检测其运动状态,运动状态包括旋转角度,移动距离和旋转/移动速度,旋转编码器起着重要作用。
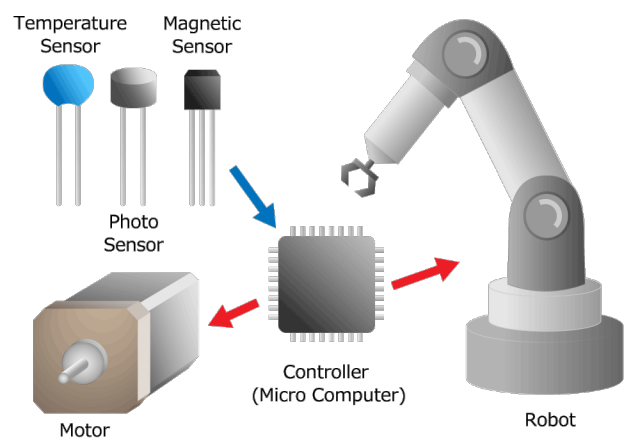
图1、传感器是工业机器人控制的核心器件
编码器是一种检测旋转角度,线性位移和速度的传感器。那么旋转编码器检测旋转和角度的机制是什么?
图2、将旋转运动转换为旋转信息的过程
编码器的核心组成是传感器,传感器是检测自然现象变化的元件或电子组件。例如,光学传感器检测光的开/关,而磁传感器检测磁场的分布。传感器具有以下作用:通过将检测到的物理量变化作为电信号输出,并且可以将信息发送到外部。如上图所示,编码器从传感器元件输出的电信号,最后将旋转/角度信息作为数字或模拟电信号发送到外部。
有哪些类型的旋转和角度信息?
旋转状态是什么?以电机为例,它停止运转,顺时针旋转,逆时针旋转,以恒定速度旋转,加速,减速等等。准确掌握这些条件并准确控制电机需要四种信息:旋转量,旋转速度,旋转方向和旋转位置。
1、旋转角度
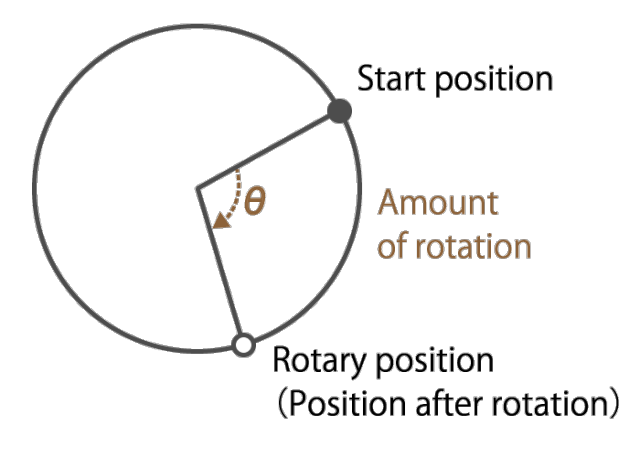
图3、旋转量说明
这是有关电动机轴角已移动多少次的信息。例如,在无刷直流电动机中,可以通过检测转子的磁极的变化来知道转子的旋转量,并有效地使电动机旋转。
2、转速:这是有关电机轴旋转速度的信息。正如我们前面提到的,伺服电动机检测无刷直流电动机或交流电动机的转速,并执行反馈控制,以使电动机轴以伺服放大器设定的速度旋转。
3、旋转方向:这是有关电动机轴旋转方向(顺时针或逆时针)的信息。在通过从编码器输出的脉冲数检测电动机轴的旋转量的系统中,如果无法识别旋转方向,则错误地对旋转量进行计数。
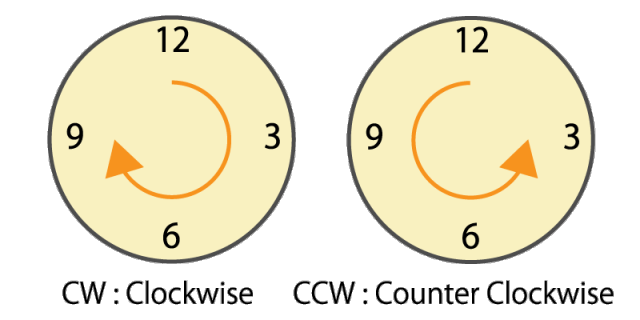
图4、顺时针和逆时针
4、旋转位置:这是有关电机轴角度多少度的信息。
正如我们前面提到的,伺服电机和步进伺服电机使用编码器来检测旋转角度并执行反馈控制,同时判断是否已达到目标旋转角度。从而实现高精度的位置控制。
旋转时什么物理量会变化?
待测物理量的差异意味着传感器检测方法的差异,因此它是决定编码器优缺点的重要组成部分。
根据检测方法,编码器分为以下四种类型:机械,光学,磁性和电磁感应类型:
1、机械式(接触式)编码器
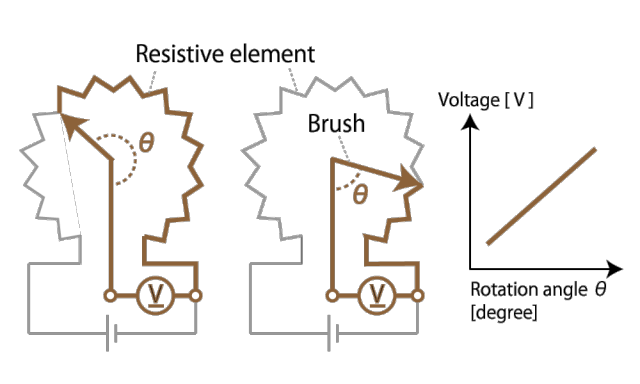
图5、机械(接触式)编码器图
该方法利用可变电阻器检测旋转位置,该可变电阻器的电阻与旋转角度成比例地变化。这种机械编码器通常称为电位器。当滑块在电阻上移动时,电位计的电阻值将与滑块的移动距离成比例的变化。
2、光学型编码器
这是一种使用光电传感器检测光是否通过安装在电机轴上旋转的码盘的径向上的缝隙的方法。光脉冲信号通过狭缝时会发生变化,并且可以通过对脉冲数进行计数来检测电机轴的旋转量。
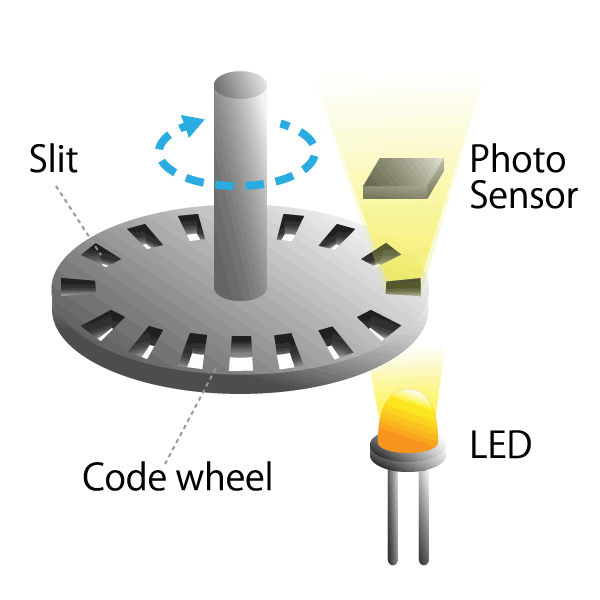
图6、光学编码器图
3、电磁式编码器
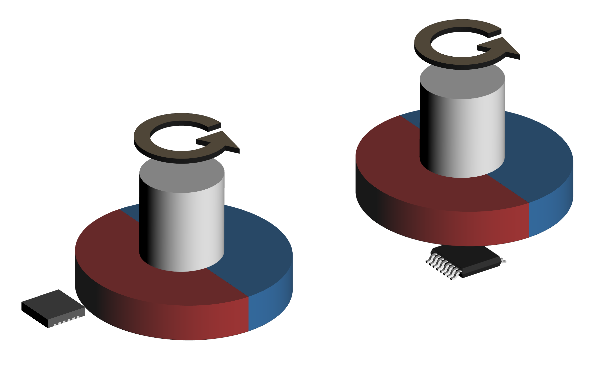
图7、磁性编码器图
该方法使用磁传感器来测量由安装在电机轴上的永磁体产生的磁场分布的变化。电动机旋转时,永磁体的磁场分布也会发生变化,因此,如果使用磁传感器检测到它,则可以确定电动机轴的旋转位置。
4、电磁感应式编码器
该方法读取安装在电机轴上的感应线圈(励磁线圈)和固定线圈(检测线圈)之间产生的磁场变化。基本原理与使用电磁感应的变压器相同,这种编码器称为旋转变压器或电容式编码器。由于使用电刷的接触方法,旋转变压器旋转感应线圈的电源存在磨损的风险。但是,有一个VR(可变电抗)解析器可以改善这种风险。
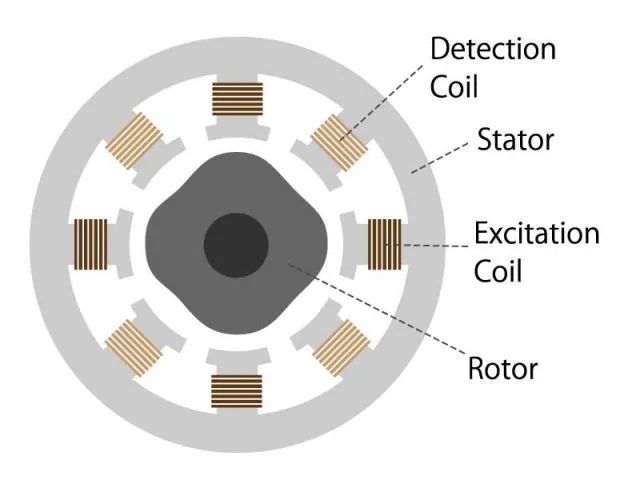
图8、电磁感应编码器图
按照电气输出形式,编码器可以分为增量型编码器(Incremental encoder)和绝对值型编码器(Absolute encoder)。增量型编码器的输出为周期性重复的信号,如方波或者正弦波脉冲。因此,可以分为方波增量型编码器和正余弦波增量型编码器。方波增量型编码器是最常用的编码器之一,通过计算方波脉冲的数量和频率得出长度和速度。方波增量型编码器有电压型输出,如TTL(也称长线驱动、线驱动或RS422)和HTL(也称推挽输出或推拉输出)等;有开关型输出,如NPN开路集电极输出和PNP开路集电极输出。正余弦波增量型编码器的输出一般为1Vpp或者0.5Vpp的正弦波和余弦波,通过计算正余弦的幅值可以精确地细分出微小的角度。绝对值型编码器的输出则是代表着实际位置的特定的数字编码,不同的编码规则对应着不同的通信协议,也就是我们通常说的通信接口。绝对值型编码器常见的的通信接口有:
模拟量(如,4-20mA电流型输出和0-10V电压型输出等);
并行口(如推挽输出和开路集电极输出等,每根线芯代表着二进制的一位数字);
串行口(如RS485,RS232, RS422等);
工业总线接口(如SSI, PROFIBUS, DeviceNet, CANOpen等);
工业以太网接口等(如PROFINET, Ethernet IP, EtherCAT, POWERLINK等)。
绝对值型编码器包含单圈绝对值型编码器(Single-turn absolute encoder)和多圈绝对值型编码器(Muliti-turn absolute encoder)。单圈绝对值型编码器可以确定一圈范围以内的角度,而多圈绝对值型编码器除了确定一圈范围以内的角度以外,还可以确定圈数。
根据使用情况,编码器大致可分为商用级与芯片级、经济级、标准工业级、各类特殊工业使用级。比如打印机,磁卡机内部的编码器,构造简单,很多外壳都没有的,几乎不用谈温度、防尘防水和电磁兼容的,价格极其便宜。芯片级:价格很低,目前国外一些半导体芯片厂家提供,或下游厂家简单封装的,无外壳或简单外壳,电源和信号仅简单处理,适用于厂家二次电路开发,接收线路距离编码器不宜超过50cm,一些流量计、阀门电调厂家选用此等级,该类编码器的防护与电磁兼容抗干扰,应由二次开发的厂家去兼顾的,如不了解,较易造成损坏。经济级的已有简单封装与简单处理,适用于单机设备,例如绣花机类的,但经济级的特点就是与工业级比较的经济性,其设计与选材都定位在经济实惠上,并不适合大型设备、流水线和工程项目,而工业级的设计、选材与检测都是按标准工业要求做的,作为工业控制系统的重要组件应用于各种工业设备、机器人、流水线和工程项目。伺服机构是使连续旋转运动或线性运动的速度保持恒定,或者精确控制一个运动的旋转角度和移动距离的机制。伺服机构由无刷直流或交流电机,编码器和驱动器组成。为了使无刷直流电动机或交流电动机的转速保持恒定,编码器检测转速。
如果检测到的速度比设定的旋转速度慢,则伺服放大器控制使电动机旋转更快;
如果检测到的速度小于设定的旋转速度,则伺服放大器进行控制。
为了精确地控制电动机的旋转角,编码器检测旋转角。伺服放大器通过检查电动机是否已移动到目标旋转角来控制电动机的旋转角。这种通过使用编码器检测电机转速和旋转角度的控制方法称为反馈控制(闭环)。
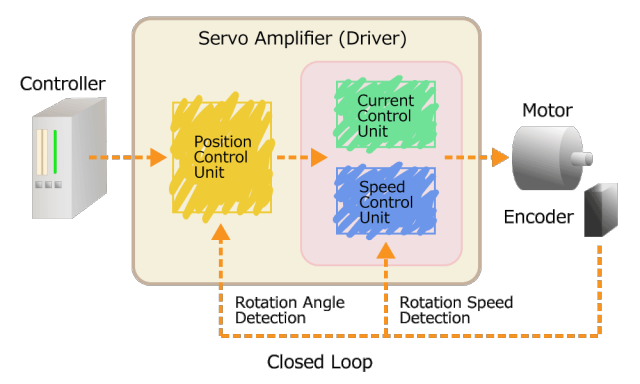
图9、伺服控制系统组成
总结一下,编码器(Encoder)为传感器(Sensor)类的一种,它利用光电、电磁、电容或电感等感应原理,主要用来检测机械运动的速度、位置、角度、 距离或计数。
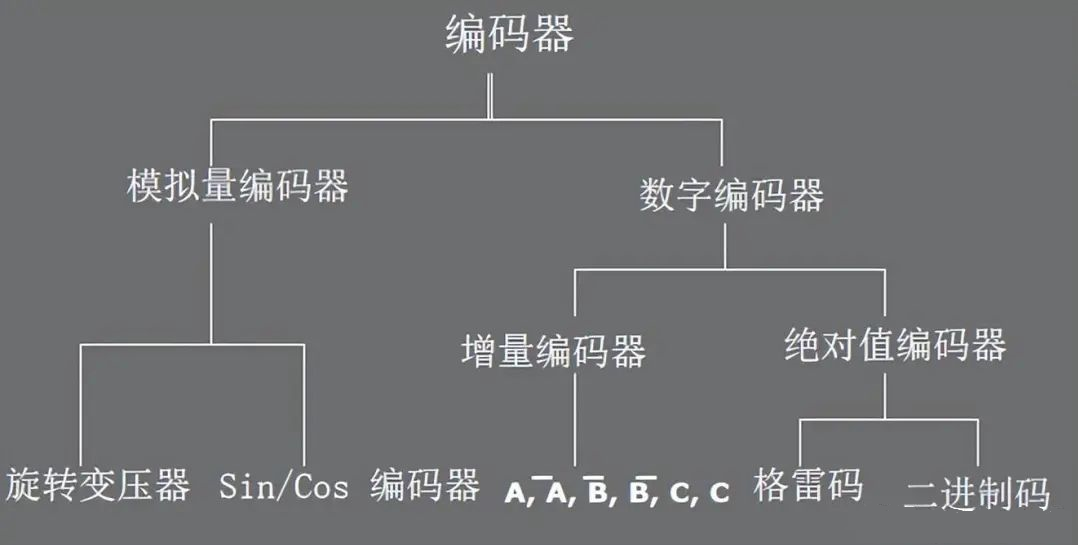
图10、编码器分类
编码器里用到的芯片供应商有博通/安华高、安森美、艾迈斯、英飞凌、迈来芯、iC-Haus、多摩川、滨松、可天士、霍尼韦尔、麦歌恩、普芮玛、赛卓电子、芯进、中科阿尔法、禹衡光学、安必轩、中微锐芯、多维科技等。常见的型号如下:

图11、编码器
1、艾迈斯磁编码器芯片AS5147P
艾迈斯的AS5147P是一款旋转编码器芯片,内部的磁性角度传感器能够检测旋转轴上两极磁铁围绕IC中心旋转时的绝对角度方位。高速芯片能看到绝对角度位置可以以PWM、ABI、UVW等不同方式输出,或通过主机接口直接读取。根据不同应用的要求,提供最高14 位的分辨率。这种技术可用于高精度角度位置检测、高速旋转系统和BLDC电机。所有旋转磁性位置传感器都可取代绝对或增量式光学传感器以及其他磁性和电感技术、电位计或磁性开关。
图12、艾迈斯的AS5147P
2、迈来芯的磁编码器芯片MLX90381迈来芯的角度编码器芯片MLX90421,采用小巧的DFN-6封装(尺寸2 mm × 2.5 mm),可实现带传感器的机电系统的小型化。该解决方案符合 ASIL 标准,可在模块层级进行编程,非常适用于转子位置检测。

图13、迈来芯的MLX90381
3、博通/安华高的AEAT-8800博通/安华高的AEAT-8800可在360度旋转范围内提供精确的角度测量。绝对角度测量以10、12、14或16位的可编程分辨率提供角度位置的指示。最高16位的分辨率,这已经是很高的精度了,这种可编程也提供了相应的灵活度。如果必要的话,还可以选择在PWM编码输出信号中接收其绝对角度位置。
图14、博通/安华高的AEAT-8800
4、麦歌恩的MT6826麦歌恩的磁性角度编码器芯片MT6826,适用于闭环步进电机控制,基于各向异性磁阻(Anisotropic Magnetoresistive,简称AMR)技术和专有的信号处理技术实现0°~360°的绝对角度测量。

图15、麦歌恩的MT6826
5、iC-Haus的iC-RB
iC-Haus的iC-RB是一款光学双扫描编码器芯片,该芯片在控制通道中具有24位的出色绝对分辨率,在安全通道中具有15位的绝对分辨率。因此,它现在可以独立运行,这意味着高分辨率安全编码器无需外部细分器。让编码器厂商能够以最少的努力实现具有高度集成安全功能的成本优化的24位绝对式编码器。
图16、iC-Haus的iC-RB
6、英飞凌的TLE5109A英飞凌的AMR磁编码器芯片TLE5109A,体积小精度高。它有极佳的角度精度,具有非常高的场范围、低抖动的特性,是专为超精密和快速旋转测量应用而设计。如 BLDC 电机位置、EPS 转子位置、踏板和旋转开关、阀门或襟翼位置感应、转向角传感、电动机、磁编码器、高速应用、汽车和工业安全应用等等。
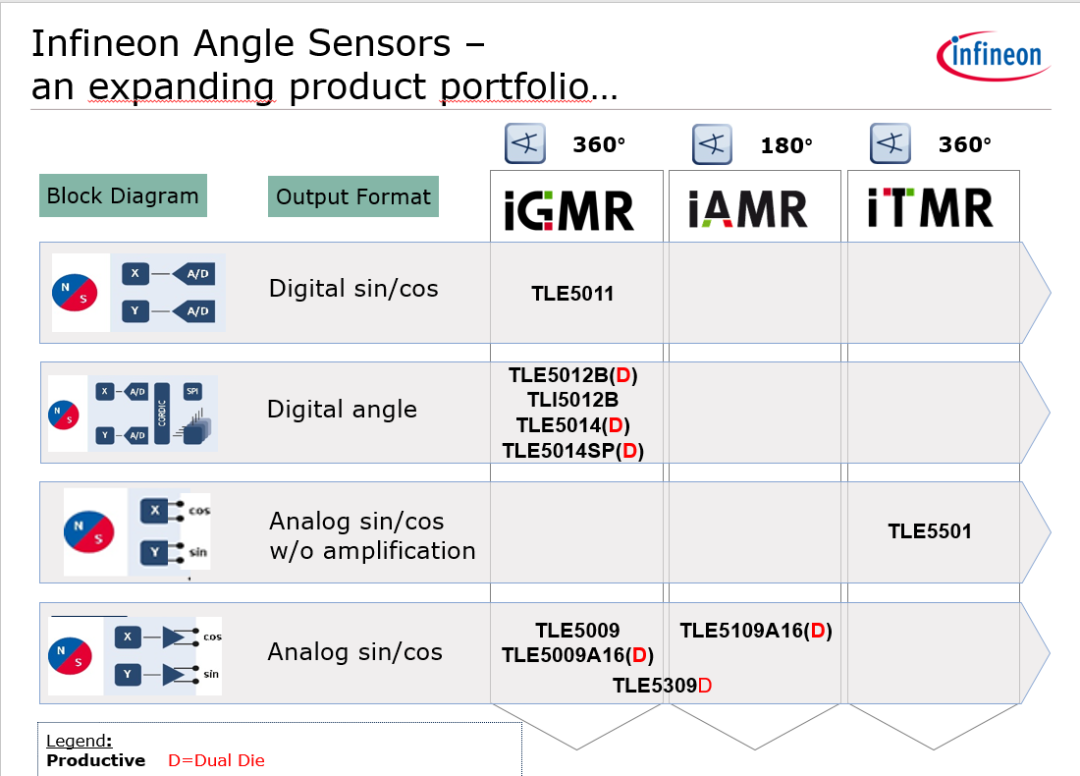
图17、英飞凌的磁编码器芯片
7、多维科技的AMR3003多维科技的AMR3003是一款基于AMR效应的角度传感器芯片,可以测量0~180°范围内的磁场角度,其输出电压正比于两倍磁场角度的正弦或余弦。AMR3003内部包含两个独特的推挽式惠斯通电桥,每个惠斯通电桥包含四个高灵敏度AMR传感元件,输出信号的峰值可达工作电压的1.6%。此外,独特的AMR惠斯通电桥结构有效地补偿了传感器的温度漂移。AMR3003采用了LGA8L (5 mm × 5 mm × 0.9 mm)和DNF6L (2 mm × 3 mm × 0.75 mm)两种封装形式,具有封装体积小,装配方便的特点。

图18、多维科技传感器芯片
工业编码器的电气和硬件设计,在稳定性、可靠性和安全性方面要求会比商业级高,相应的芯片选型和项目设计工作则更难。拍明芯城是快速撮合的元器件交易平台,过去数年已积累了丰富的优势货源。我们聚焦服务元器件长尾客户群,让每一家芯片原厂或分销商的每一款芯片,在Design In、Design Win和流通中更高效,帮助工程师的方案选型、试样及采购,为电子产业供需略尽绵薄之力。
芯片/模块供需,欢迎常来 www.iczoom.com 看看。
责任编辑:David
【免责声明】
1、本文内容、数据、图表等来源于网络引用或其他公开资料,版权归属原作者、原发表出处。若版权所有方对本文的引用持有异议,请联系拍明芯城(marketing@iczoom.com),本方将及时处理。
2、本文的引用仅供读者交流学习使用,不涉及商业目的。
3、本文内容仅代表作者观点,拍明芯城不对内容的准确性、可靠性或完整性提供明示或暗示的保证。读者阅读本文后做出的决定或行为,是基于自主意愿和独立判断做出的,请读者明确相关结果。
4、如需转载本方拥有版权的文章,请联系拍明芯城(marketing@iczoom.com)注明“转载原因”。未经允许私自转载拍明芯城将保留追究其法律责任的权利。
拍明芯城拥有对此声明的最终解释权。
相关资讯
:
基于Xilinx XCKU115的半高PCIe x8 硬件加速卡设计方案

图像传感器在汽车、工业和边缘AI的应用动向

基于RFID技术的智能档案管理系统设计方案

如何确保工业物联网设计符合ISA/IEC安全标准

基于LPC55S69+i.MX 8M的快速灵活EV充电系统解决方案

如何利用物质连接智能家居自动化的孤岛

















 2012- 2022 拍明芯城ICZOOM.com 版权所有 客服热线:400-693-8369 (9:00-18:00)
2012- 2022 拍明芯城ICZOOM.com 版权所有 客服热线:400-693-8369 (9:00-18:00)


