



 产品分类
产品分类
如何使用高能效监控摄像机PTZ IC设计更安全的世界
 122
122
 拍明芯城
拍明芯城
原标题:https://www.digikey.com/en/articles/how-to-design-for-a-safer-world-using-energy-efficient-surveillance-camera-ptz-ics
视频监控的使用继续普及,部分原因是人工智能(AI)的发展,作为各种“智能城市”计划的一部分,对公共街道,小巷和聚会场所进行智能,自动监控。在办公室、零售商店、住宅大堂、超市、博物馆、建筑工地、工业环境和仓库等封闭区域,视频监控的使用也越来越多,以确保安全和安保。这种广泛使用,加上基于人工智能的分析要求,意味着设计人员正在竞相提高系统效率和性能,同时降低成本。
这些改进在很大程度上可以通过将紧凑、低功耗、灵敏、高分辨率的成像IC与智能、精密的运动控制系统相结合来实现。使用这种方法的元素,设计人员可以实现节能的远程视频监控,从而越来越多地消除由于模糊的图像或摄像机视线之外的事件而需要有人亲自检查区域或场所的需要。
然而,与任何不断增长的应用领域一样,需要克服各种技术挑战,其中许多挑战可以直接使用用于摄像机平移、倾斜和变焦 (PTZ) 的节能电子子系统来解决。
本文着眼于 PTZ 在监控中的作用,并讨论用于控制 PTZ 功能的节能、精密、低功耗电机和运动控制电子设备如何成为实施视频监控系统的关键。然后介绍并研究了运动控制IC的应用 特瑞迈运动控制有限公司,现在是 ADI公司 还介绍了评估板。
通过 PTZ 运动控制增强有效监控
无论是用于安全安装还是过程监控,现代视频监控系统都不仅仅是一个以固定方向指向目标区域的摄像机。相反,人工智能通过减少误报和确保资源的最佳部署来更有效地利用捕获的图像,而电动 PTZ 的使用允许摄像机从左到右扫描(平移)和上下移动(倾斜),从而重新定义被监视的区域(图 1)。人工智能和PTZ都有助于更有效,通常更“绿色”的监控方法。在 PTZ 的情况下,根据系统设计,运动可以由摄像机组件自主引导,由安全系统远程控制,甚至手动操作。
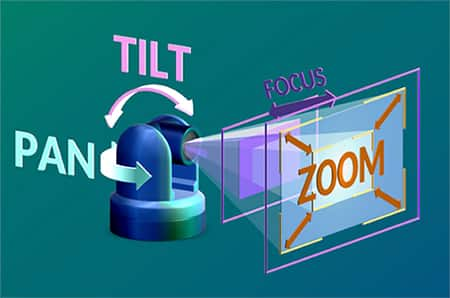
图 1:具有从左到右平移、上下倾斜和进/出变焦 (PTZ) 的监控摄像机比静态固定就地摄像机提供了更大的灵活性。(图片来源:轴测技术有限公司)
相机通过平移和倾斜移动克服了使用广角镜头和宽视场(FOV)的权衡困境,可以捕获更大的区域,但以牺牲场景细节和引入曲率失真为代价。PTZ 功能还可以为安全系统节省成本,因为一台摄像机可以完成许多静态摄像机的工作。
相机的运动可以通过不同的技术进行指导。具有 PTZ 功能的监控摄像机通常还支持多个预设位置,用户可以在其中指定要监控的所需位置,以及从一个位置到另一个位置的预定顺序和时间。这提供了对广阔区域的远程监控,无需用户输入。
将电子设备与 PTZ 电机匹配
虽然运动控制是 PTZ 实施的核心,但有效 PTZ 系统的重要因素是通过卓越的电机控制进行平稳准确的跟踪。设计人员可以考虑使用无刷直流电机和更具挑战性但通常更具优势的步进电机来实现高精度,并可以使用ADI的Trinamic技术和IC实现必要的平滑度和精度。
低功耗运行也至关重要。许多配备复杂 PTZ 控制的监控摄像机现在都是支持以太网供电 (PoE) 的设备。最新的 PoE 标准 (IEEE 802.3bt-2018) 支持每个以太网电缆连接高达 100 瓦的功率。
PTZ系统的设计人员对电机类型有三种选择,选择决定了要使用的控制 IC。选项包括经典有刷直流电机、无刷直流 (BLDC) 电机和步进电机(图 2)。
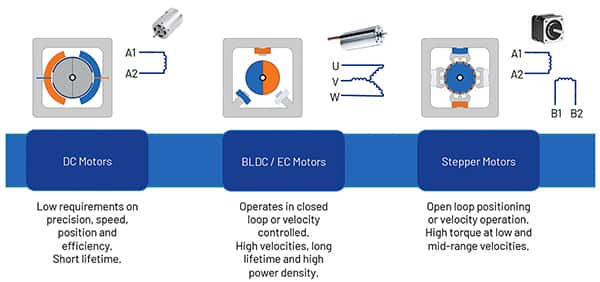
图 2:三种基本的直流电机是古老的有刷、无刷和步进电机。(图片来源:ADI公司)
每种电机配置在功能、性能和管理/控制需求方面都有权衡:
有刷直流电机 是第一个开发的直流电机,并已成功使用超过100年。它设计简单,但难以控制,最适合开放式自由运行情况,而不是精确定位或走走停停的操作。此外,它的电刷容易磨损,存在可靠性问题,并可能产生不可接受的电磁干扰(EMI)。虽然它仍然用于低成本的大众市场应用,如玩具,甚至一些高端应用,如医疗输液泵,但它通常不是PTZ设计的可行选择。
无刷直流电机 (也称为电子换向或EC电机)非常适合带有位置传感器的闭环设计,位置传感器也可用于速度控制(图3)。它可以实现高速和长寿命,同时封装高功率密度。
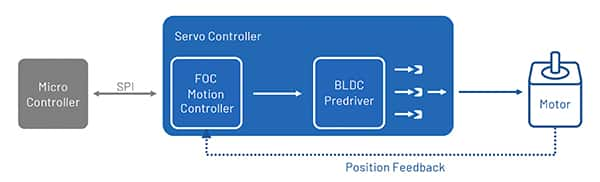
图 3:BLDC 电机最常用于闭环布置,以实现定位精度和高速;安装在轴上的位置传感器向伺服控制器提供所需的反馈。(图片来源:ADI公司)
BLDC 电机的控制需要精确计时为电机定子线圈供电的电流。为了提高性能和精度,经常使用闭环反馈。为此,编码器可用于检测转子位置,以及用于实现磁场定向控制(FOC)的设计的线圈电流检测(稍后将详细介绍FOC)。
特里纳米克 TMC4671-LA 多相伺服控制器/电机驱动器是专门为此任务设计的 IC,它硬连线了用于 BLDC 电机的嵌入式 FOC 算法(图 4)。
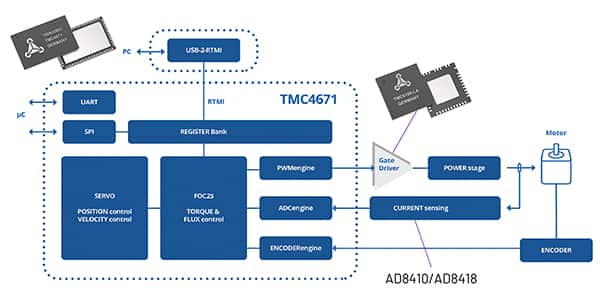
图 4:专为 BLDC 电机设计的 Trinamic TMC4671-LA 伺服控制器/电机驱动器采用嵌入式 FOC 算法硬连线。(图片来源:ADI公司)
它也可以用于其他电机类型,例如 永磁同步电机 (PMSM),以及两相步进电机、直流电机和音圈执行器。请注意,BLDC 电机和永磁同步电机之间的区别在于,前者是直流 (DC) 电机,而永磁同步电机是交流 (AC) 电机。因此,BLDC 电机是一种电子换向直流电机,没有物理换向器组件;相比之下,PMSM是一种交流同步电机,它使用永磁体提供必要的励磁。
TMC4671-LA 使用基本的 SPI 或 UART 接口与其微控制器通信。它在硬件中实现了所有必需的控制功能和特性,以及错误/故障状态监控。它包括集成模数转换器 (ADC)、位置传感器接口、位置插补器和其他必要的功能,可为各种伺服应用提供完整的控制器。
此功能对于应对 BLDC 电机控制挑战至关重要,因为这些算法非常复杂。幸运的是,复杂的细节完全由IC处理,因此这些细节不会给设计工程师或系统微控制器带来负担(图5)。
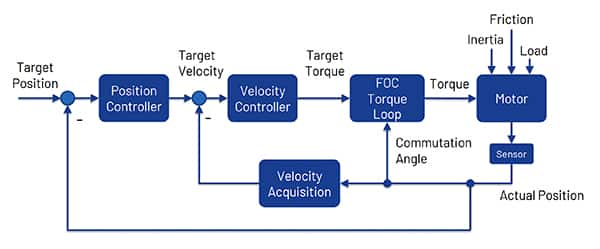
图 5:TMC4671-LA 包含并执行复杂、精密 BLDC 控制功能(如 FOC)所需的多个链接功能块,从而将这项任务从设计人员和主机处理器中卸下来。(图片来源:ADI公司)
其 100 kHz 控制环路频率是许多 BLDC 控制器 20 kHz 频率的五倍,具有关键优势,包括更快的建立时间、更快的扭矩控制命令响应、更好的位置稳定性以及降低过流情况的风险。后者可能会损坏电机驱动器或电机。
步进电机 是 BLDC 电机的替代品。该电机非常适合开环定位或速度操作,并在中低档速度下提供高扭矩(图 6)。通常,具有可比性能的步进电机比 BLDC 电机便宜,但它们存在必须解决的操作挑战。
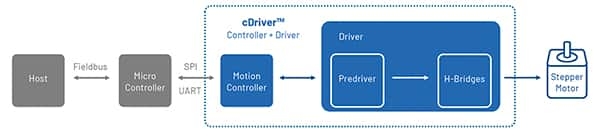
图 6:与 BLDC 电机控制器相比,步进电机控制器具有从主机到电机驱动器和电机的更直接路径。(图片来源:ADI公司)
乍一看,步进电机控制器的信号路径流程似乎比 BLDC 电机控制器简单一些。虽然这在某些方面是正确的,但精确有效的步进电机控制器必须提供特定功能以满足该电机的需求。
IC 例如 TMC5130A,具有串行通信接口的高性能控制器和驱动器 IC(面向两相步进电机)旨在最大限度地减少或消除相关问题(图 7)。
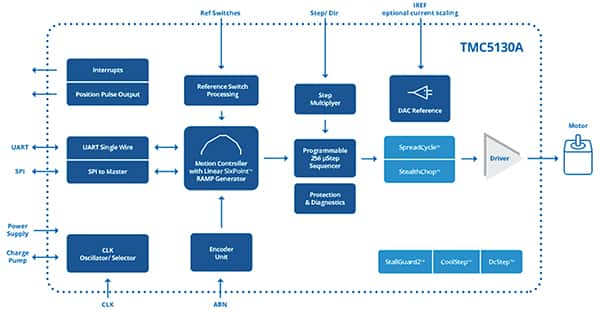
图 7:TMC5130A 是一款高性能控制器和驱动器 IC,具有面向两相步进电机的串行通信接口。(图片来源:ADI公司)
该设备将用于自动目标定位的灵活斜坡发生器与高度先进的步进电机驱动器相结合。它还包括内部 MOSFET,可直接提供高达 2 安培 (A) 的线圈电流(峰值为 2.5 A),并具有每整步 256 微步的分辨率。
然而,TMC5130A 超越了基本的步进电机驱动,因为它解决了设计人员在决定使用这种电机类型时面临的一些挑战。两个最值得注意和最明显的问题是电机在行走时产生的可听噪声,以及电机运行的“平稳性”。虽然这些在工业应用等环境中可能不是问题,但在 PTZ 监控使用中可能会令人不安,甚至适得其反。
对于第一个挑战,TMC5130A 实现了 StealthChop,这是一种专有的基于电压的脉宽调制 (PWM) 斩波器,可根据占空比调制电流(图 8)。此功能针对中低速度进行了优化,并显著降低了可听噪声。
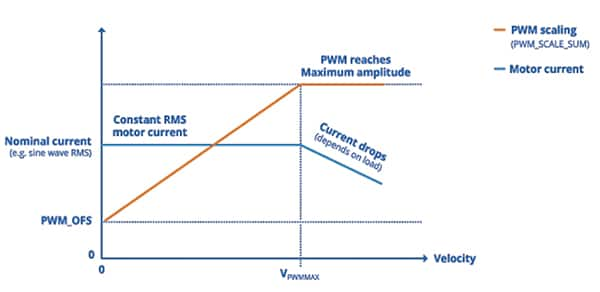
图 8:TMC5130A 中的 StealthChop 技术根据占空比调制电流驱动,大大降低步进电机可闻噪声。(图片来源:ADI公司)
对于第二个挑战,TMC5130A 使用专有的电流斩波技术 SpreadCycle。这种逐周期、基于电流的驱动斩波方案实现了驱动相位的缓慢衰减,从而减少了电损耗和转矩脉动。它使用基于迟滞的电机电流与目标电流的平均,即使在高速下也能产生电机电流的正弦波(图 9)。
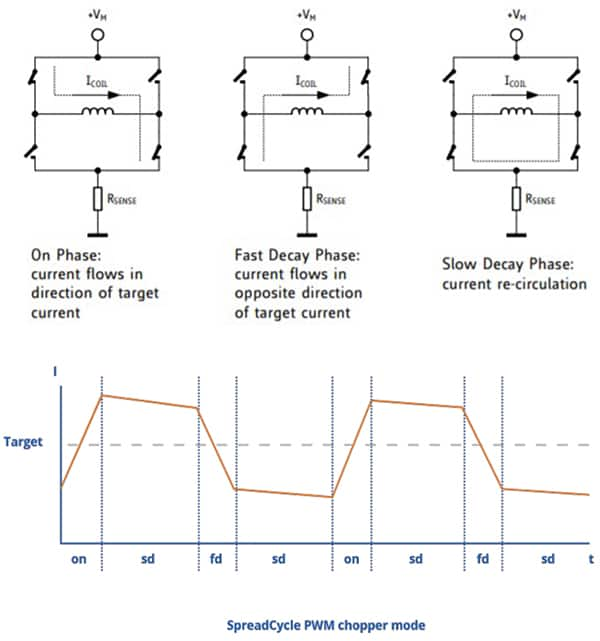
图 9:TMC5130A 中基于逐周期电流的 MOSFET 斩波方案可降低电气损耗和转矩纹波。(图片来源:ADI公司)
TMC5130A 的其他独特功能包括其 StallGuard 电机失速检测和 CoolStep 动态自适应电流驱动,后者利用了前者。
StallGuard 通过反电动势 (EMF) 提供无传感器负载检测,并且可以在一个完整的步骤内停止电机,从而保护电机驱动器和电机。另一个好处是,可以调整其灵敏度以满足应用的要求。CoolStep 根据反电动势失速防护读数调整电机电流。在低负载情况下,它可以将电机电流降低 75%,从而节省功耗并减少发热。
当驱动两个两相步进电机而不是单个两相步进电机(如 TMC5130A 所支持的那样)时, TMC5072 具有许多相同的功能(图 10)。它可以驱动两个独立的线圈,每个线圈的电流高达1.1 A(峰值为1.5 A);两个驱动器也可以并联,为单个线圈提供2.2 A(3 A峰值)。
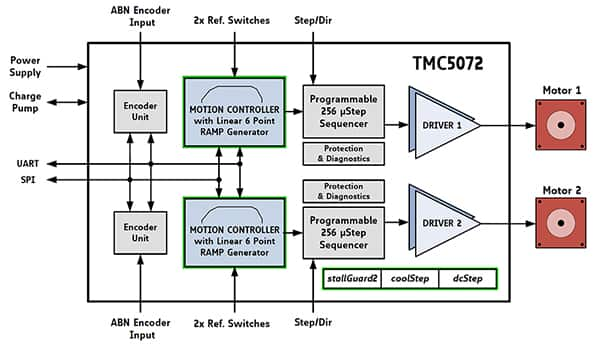
图 10:TMC5072 是 TMC5130A 的双驱动器版本;两个独立的输出可以并联使用。(图片来源:ADI公司)
FOC 改变场景
还有一个来自电机的位置反馈问题。步进电机不需要反馈,但通常会添加反馈以确保高精度控制,而 BLDC 设计则需要反馈。反馈通常使用编码器(通常基于霍尔效应传感器或光学编码器)实现,但受到更新速率和分辨率以及增加系统处理负担的限制。
对于 BLDC 电机,还有另一种控制选项。磁场定向控制(FOC)(也称为矢量控制(VC))旨在解决与反馈更新速率和分辨率以及编码器成本和安装问题相关的问题。
简而言之,FOC是一种用于电机的电流调节方案,它使用磁场的方向和电机转子的位置。它基于“简单”的观察,即两个力分量作用在电动机的转子上。一个组件,称为直接或 ID,只是沿径向方向拉动,而另一个分量,正交或IQ,通过切向拉动施加扭矩(图 11)。
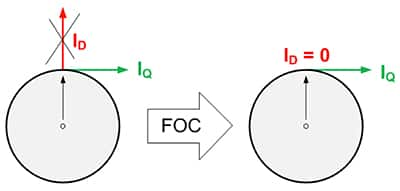
图 11:启发 FOC 的原理是观察到转子受到两个正交力,一个径向到转子轴,另一个与转子轴线相切。(图片来源:ADI公司)。
理想的FOC提供电流的闭环控制,从而产生纯转矩电流(IQ)—无直流电,ID.然后,它调整驱动电流强度,使电机提供目标扭矩量。FOC 的众多功能之一是它可以最大化有功功率并最大限度地减少空闲功率。
FOC 是一种控制电动机的节能方法。它适用于高电机动力学和高速条件,并且由于其闭环控制方面,它增加了本质安全功能。它使用基于电阻的标准电流检测来测量通过定子线圈的电流幅度和相位以及转子的角度。然后将转子的测量角度调整到磁轴。转子角度使用霍尔传感器或位置编码器测量,因此已知转子磁场的方向。
然而,从FOC观测到完整的电机控制方案,有一条漫长而极其复杂的路径。FOC需要了解一些静态参数,包括电机极对的数量,每转的编码器脉冲数,编码器相对于转子磁轴的方向,以及编码器的计数方向,以及一些动态参数,如相电流和转子方向。
此外,用于相电流闭环控制的两个PI控制器的比例和积分(P和I)参数的调整取决于电机的电气参数。这些参数包括电阻、电感、电机的反电动势常数(也是电机的转矩常数)和电源电压。
设计人员在应用FOC时面临的挑战是所有参数中的高自由度。虽然 FOC 的流程图甚至源代码都随处可见,但实现它所需的实际“可交付”代码是复杂而复杂的。它包括多个坐标变换(克拉克变换、公园变换、逆公园变换和逆克拉克变换),这些变换公式化为一组矩阵乘法,以及密集的重复计算和计算。网上有许多 FOC 教程,从定性、无方程/轻的教程到密集的数学教程;TMC4671 数据表位于中间位置,值得查看。
尝试通过固件实现 FOC 需要大量的 CPU 计算能力和资源,因此限制了设计人员在处理器选择方面的限制。但是,通过使用 TMC4671,设计人员可以从更广泛的微处理器甚至低端微控制器中进行选择,同时还不存在中断处理和直接存储器访问等编码问题。只需通过 SPI(或 UART)通信端口连接到 TMC4671,因为编程和软件设计简化为目标参数的初始化和设置。
不要忘记司机
虽然某些电机控制 IC(例如用于步进电机的 TMC5130A 和 TMC5072)集成了大约 2 A 驱动器的电机栅极驱动器功能,但其他 IC(例如用于 BLDC 电机的 TMC4671-LA)则没有。对于这些情况,诸如 TMC6100-LA-T 半桥栅极驱动器 IC 增加了所需的功能(图 12)。这款三通道半桥 MOSFET 栅极驱动器采用 7 × 7 毫米 (mm) QFN 封装,提供高达 1.5 A 的驱动电流,适合驱动处理高达 100 A 线圈电流的外部 MOSFET。
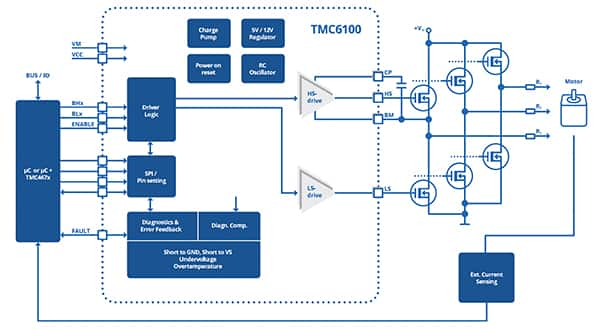
图 12:TMC6100-LA-T 半桥栅极驱动器 IC 提供高达 1.5 A 的驱动电流,适合驱动提供高达 100 A 线圈电流的外部 MOSFET。(图片来源:ADI公司)。
TMC6100-LA-T 具有驱动电流的软件控制功能,可在系统内优化其设置。它还包括可编程安全功能,如短路检测和过热阈值;与用于诊断的SPI接口一起,这支持稳健可靠的设计。
为了进一步加快上市时间并简化参数优化和驱动程序调整,Trinamic 提供了 TMC6100-评估 通用评估板(图 13)。该装置提供方便的硬件操作,以及用于评估的用户友好型软件工具。该系统由三部分组成:基板、带有多个测试点的连接器板、TMC6100-EVAL 以及 TMC4671-评估 FOC 控制器。
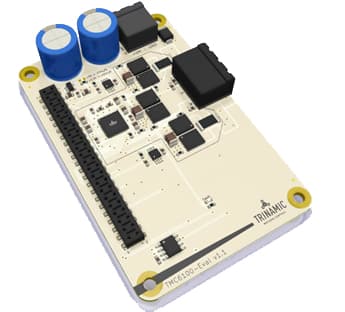
图 13:TMC6100-EVAL 通用评估板简化了驱动器参数的优化和驱动器的调整,以匹配电机和负载情况。(图片来源:ADI公司)
结论
用于监控和安全的摄像机是减少物理旅行和相关能源使用的强大工具。它们通常使用 PoE,并通过电机驱动的 PTZ 控制进行增强,但这种控制功能很复杂。如图所示,通过集成有效电机控制所需的各种功能,并根据需要使用栅极驱动器,Trinamic的IC为PTZ使用的无刷和步进直流电机提供了平稳精确的运动和定位。
Trinamic 为工程师提供广泛的解决方案,可加速实施针对应用需求量身定制的高效、精密电机控制系统。这些产品解决了硬件方面的挑战,从而最大限度地降低了整体设计和软件复杂性。
责任编辑:David
【免责声明】
1、本文内容、数据、图表等来源于网络引用或其他公开资料,版权归属原作者、原发表出处。若版权所有方对本文的引用持有异议,请联系拍明芯城(marketing@iczoom.com),本方将及时处理。
2、本文的引用仅供读者交流学习使用,不涉及商业目的。
3、本文内容仅代表作者观点,拍明芯城不对内容的准确性、可靠性或完整性提供明示或暗示的保证。读者阅读本文后做出的决定或行为,是基于自主意愿和独立判断做出的,请读者明确相关结果。
4、如需转载本方拥有版权的文章,请联系拍明芯城(marketing@iczoom.com)注明“转载原因”。未经允许私自转载拍明芯城将保留追究其法律责任的权利。
拍明芯城拥有对此声明的最终解释权。
相关资讯
:
基于Xilinx XCKU115的半高PCIe x8 硬件加速卡设计方案

图像传感器在汽车、工业和边缘AI的应用动向

基于RFID技术的智能档案管理系统设计方案

如何确保工业物联网设计符合ISA/IEC安全标准

基于LPC55S69+i.MX 8M的快速灵活EV充电系统解决方案

如何利用物质连接智能家居自动化的孤岛

















 2012- 2022 拍明芯城ICZOOM.com 版权所有 客服热线:400-693-8369 (9:00-18:00)
2012- 2022 拍明芯城ICZOOM.com 版权所有 客服热线:400-693-8369 (9:00-18:00)


