



 产品分类
产品分类
基于STM32F107与RT-Thread的数据采集器设计方案
 15
15
 拍明
拍明
原标题:基于STM32F107与RT-Thread的数据采集器设计方案
作者孙冬梅:南京工业大学自动化与电气工程学院博士、副教授
设计了基于STM32F107设计的数据采集器,实现多种数据(串口、CAN口)采集处理后通过 GPRS模块 无线上传。重点编写了CAN设备驱动; 使用设备方式实现GPRS模块串口数据的上传下载;最后提出了使用线程过程中出现的一些问题。
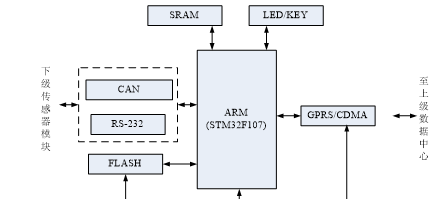
一、 功能分析
系统功能如图1 所示,不算太复杂。由于下级传感器模块的上报的数据内容很多,导致编写处理程序内容较多。
二、CAN驱动编写
为了模块化地处理传感器的主动上报数据,CAN设备不再用以前的中断处理,而是采用了RTT的设备框架,重新编写了device的驱动。研究RTT里的CAN总线收发设备:

发现只有框架,没有内容。就仿着串口写一个candevice。研究组件使用 中的串口驱动:
这是一个读代码的过程,弄清楚框架后,编写类似于linux中的驱动编写。
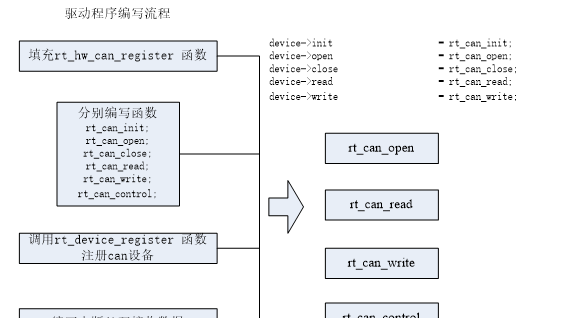
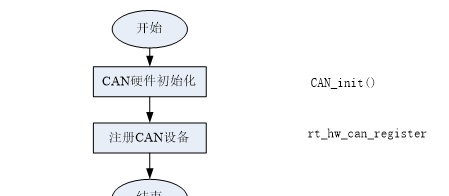
以上程序全部写好后,就可以使用设备通用操作函数来操作CAN。在主程序中首先要初始化设备,再注册设备。
三、设备方式实现串口数据处理
GPRS模块使用实际上是串口数据的收到处理。首先创建gprswatch进程,用来监控串口接收数据。
void gprswatch(void){
rt_thread_t thread;
thread = rt_thread_find("gprswatch");
if( thread != RT_NULL)
rt_thread_delete(thread);
/* 创建gprswatch线程*/
thread = rt_thread_create("gprswatch",
gprswatch_entry, RT_NULL,
0x1000, 0x12, 200);
/* 创建成功则启动线程*/
if( thread != RT_NULL)
{
rt_thread_startup(thread);
//rt_thread_delay(RT_TICK_PER_SECOND/2);
} }
监视GPRS串口线程中,当收到串口数据后,接收并分析,置位网络状态。
/* 监视GPRS串口线程入口*/void gprswatch_entry(void* parameter){
rt_err_t result = RT_EOK;
rt_uint32_t event;
unsigned char gprs_rx_buffer[GPRS_RX_LEN]={0x00};
while(1)
{
result = rt_event_recv(&rev_event,
REV_MASK, RT_EVENT_FLAG_OR | RT_EVENT_FLAG_CLEAR,
RT_WAITING_FOREVER, &event);
if (result == RT_EOK)
{
if (event & REV_DATA)
{
rt_memset(gprs_rx_buffer,0x00,sizeof(gprs_rx_buffer));
rt_thread_delay(RT_TICK_PER_SECOND/10);
rt_device_read(gprs_device, 0, gprs_rx_buffer, GPRS_RX_LEN);
rt_kprintf(gprs_rx_buffer);
/*监视GPRS模块接收数据*/
if(rt_strstr((char const*)gprs_rx_buffer,"MYURCCLOSE: 0"))//网络断
{
net_status = CONNECT_ERROR;
rt_kprintf("
网络断。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。
");
}
else if(rt_strstr((char const*)gprs_rx_buffer,"Call Ready"))//模塊重啟
{
net_status = CONNECT_NULL;
rt_kprintf("
模塊重啟。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。
");
}
else if(rt_strstr((char const*)gprs_rx_buffer,"+CPIN: NOT READY"))//卡被拔出
{
net_status = CONNECT_ERROR;
rt_kprintf("
卡被拔出。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。
");
}
else if(rt_strstr((char const*)gprs_rx_buffer,"$MYURCACT: 0,0"))//網絡斷開
{
net_status = CONNECT_DISCONNECT;
rt_kprintf("
网络断开。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。
");
}
else if(rt_strstr((char const*)gprs_rx_buffer,"MYURCREAD: 0"))//有网络数据
{
net_status = CONNECT_GPRSDATAIN;
}
else if(rt_strstr((char const*)gprs_rx_buffer,"+CMTI:"))//有短信来
{
net_status = CONNECT_MSGDATAIN;
}
else
{
}
}
if (event & REV_STOPWATCH)
{
return;
}
}
}}
在程序其它地方完成对应GPRS模块的监控和操作。对GPRS模块读和写操作也编写了一个设备操作函数,主要是利用前面编写的gprswatch线程操作:
/*GPRS模块发送和接收*/rt_bool_t gprs_send_data_package(unsigned char *cmd,char *ack,rt_uint32_t waittime, rt_uint8_t retrytime, rt_uint32_t len){
rt_bool_t res = RT_FALSE;
rt_err_t result = RT_EOK;
rt_uint32_t event;
unsigned char gprs_rx_buffer[GPRS_RX_LEN]={0x00};
rt_thread_t thread;
thread = rt_thread_find("gprswatch");
if( thread != RT_NULL)
{
rt_thread_delete(thread);
}
do
{
rt_device_write(gprs_device, 0, cmd, len);
result = rt_event_recv(&rev_event,
REV_MASK, RT_EVENT_FLAG_OR | RT_EVENT_FLAG_CLEAR,
waittime*RT_TICK_PER_SECOND, &event);
if (result == RT_EOK)
{
if (event & REV_DATA)
{
rt_memset(gprs_rx_buffer,0x00,sizeof(gprs_rx_buffer));
rt_thread_delay(RT_TICK_PER_SECOND/2);
rt_device_read(gprs_device, 0, gprs_rx_buffer, GPRS_RX_LEN);
rt_kprintf(gprs_rx_buffer);
if(rt_strstr(cmd,MSG_IMSI))//如果是读IMSI 解析出IMSI数据
{
unsigned char *addr;
addr = rt_strstr((char const*)gprs_rx_buffer,"AT+CIMI")+10;
if(addr!=NULL)
{
strncpy(&imsi[0],addr,15);
rt_kprintf("
IMSI = :%s
" ,imsi);
}
}
if(rt_strstr(cmd,MSG_IMEI))//如果是读IMEI 解析出IMEI数据
{
unsigned char *addr;
addr = rt_strstr((char const*)gprs_rx_buffer,""")+1;
if(addr!=NULL)
{
strncpy(&imei[0],addr,15);
rt_kprintf("
IMEI = :%s
" ,imei);
}
}
if(rt_strstr(cmd,CSQ_CMD))//如果是读CSQ 解析出dbm数据
{
unsigned char csq[5] = {0x00};
unsigned char *addr;
rt_int16_t dbm;
addr = rt_strstr((char const*)gprs_rx_buffer,",") - 3;
rt_strncpy(csq, addr,3);
if(addr!=NULL)
{
dbm = 2* atoi(csq) - 109;
dbm_data[0] = dbm;
dbm_data[1] = dbm>>8;
rt_kprintf("
DBM = %d
" ,dbm);
rt_kprintf("
RSSI = %02x%02x
" ,dbm_data[0],dbm_data[1]);
}
}
if((rt_strstr(gprs_rx_buffer,ack))||(rt_strstr(gprs_rx_buffer,"OK")))
{
res = RT_TRUE;
if(rt_strstr(cmd,MG323_READ_CMD))//如果是读数据命令,将数据拷出
{
rt_memcpy(gprs_rx_data, gprs_rx_buffer, GPRS_RX_LEN);
}
}
else
res = RT_FALSE;
}
if(rt_strstr((char const*)gprs_rx_buffer,"MYURCREAD: 0"))//有网络数据
{
net_status = CONNECT_GPRSDATAIN;
rt_kprintf("
收到网络数据!
");
}
}
retrytime--;
}while((!res)&&(retrytime>=1));
gprswatch();
return res;}
至此,基本实现了GPRS模块的设备操作。
四、调试过程中的经验
1.进程初始化及分配内存
在RTT工程中,int rt_application_init(void) 函数给出了一个最基本的使用方法,动态创建线程rt_thread_create,动态分配内存。在程序编写的过程,由于内存太小,不得不心划分分配的内存。手册建议在程序运行过程中使用命令查看线程的占用内存,再按经验分内存,这样操作,还是地调试过程中出现很多次错误。后来再翻看手册,仿造例子修改程序为静态分配内存的线程创建,rt_thread_init,上面的错误就不再出现了。
2.使用finsh
在调试过程中大量使用了finsh, 极大地方便了调试。

引用用户手册的说明:编写了一个函数,如果不在程序中运行,便可以将此函数引出到finsh中。

在串口控制台中操作,就可以很方便地实现GPRS相关函数的调试,而并需要在主程序中运行以上函数。
3.RTT例程的格式
编写了基于RTT的 STM32F107平台的例程,发布在github上:https://github.com/sundm75/STM32F107Board-rttproject每个example下的 applications中,都有一个对应的 test**** 文件。该文件中,全部使用的finsh 在串口控制中操作。
- End -
责任编辑:David
【免责声明】
1、本文内容、数据、图表等来源于网络引用或其他公开资料,版权归属原作者、原发表出处。若版权所有方对本文的引用持有异议,请联系拍明芯城(marketing@iczoom.com),本方将及时处理。
2、本文的引用仅供读者交流学习使用,不涉及商业目的。
3、本文内容仅代表作者观点,拍明芯城不对内容的准确性、可靠性或完整性提供明示或暗示的保证。读者阅读本文后做出的决定或行为,是基于自主意愿和独立判断做出的,请读者明确相关结果。
4、如需转载本方拥有版权的文章,请联系拍明芯城(marketing@iczoom.com)注明“转载原因”。未经允许私自转载拍明芯城将保留追究其法律责任的权利。
拍明芯城拥有对此声明的最终解释权。
相关资讯
:
基于MC33771主控芯片的新能源锂电池管理系统解决方案

AMIC110 32位Sitara ARM MCU开发方案

基于AMIC110多协议可编程工业通信处理器的32位Sitara ARM MCU开发方案

基于展讯SC9820超低成本LTE芯片平台的儿童智能手表解决方案

基于TI公司的AM437x双照相机参考设计

基于MTK6580芯片的W2智能手表解决方案









 2012- 2022 拍明芯城ICZOOM.com 版权所有 客服热线:400-693-8369 (9:00-18:00)
2012- 2022 拍明芯城ICZOOM.com 版权所有 客服热线:400-693-8369 (9:00-18:00)


