



 产品分类
产品分类
基于SRF05超声波传感器的超声波移动机器人导航设计方案
 6
6
 拍明
拍明
原标题:超声波移动机器人导航设计方案
摘要: 采用新型的超声波传感器,设计并开发基于ARM9 与嵌入式linux 为平台的轮式移动机器人平台的下的未知环境的避障导航系统。本文重点介绍该超声波传感器的实现原理以及在机器人平台中的整个软件实现流程以及控制机器人行走的实现方法。
1 引言
在项目开发中采用从英国进口的SRF05 超声波传感器,它的回波反馈与测距方式与通常使用的超声波传感器相比较特别, 在ARM中实现也稍有难度, 但该传感器精度很高可达到1cm, 因此用该传感器去掉了用于近距离测距的红外测距模块节约了硬件资源。
该机器人的最小系统为,触摸屏模块,超声波模块,摄像头图像采集模块,直流电机闭环控制系统,在整个系统中测距是最总要的一环,它直接影响电机运行距离的精度,在有效范围内的图像采集控制。整个系统都是在ARM9 与linux 平台中完成,每个模块都是用设备驱动的方式实现使得模块的控制更加方便。
2 SRF05 超声波测距方法
提供一个10us 的脉冲触发超声波传感器,SRF05 会发出8 个周期的频率为40khz 的超频脉冲,此时在echo 也是就回波口上的电平变为高,此时定时器开始计时,等到echo 变为低电平证明有障碍物此时停止计时,高脉冲的宽度有测距的距离成正比,该超声波的有效测距范围为1cm~4m, 因此如果没有障碍物或障碍物大于4m,echo 依然会变为低电平此时定时器的时间为30ms, 因此在测距时定时器的周期应大于30ms 这样才能有效测距。
原理如图1 所示。

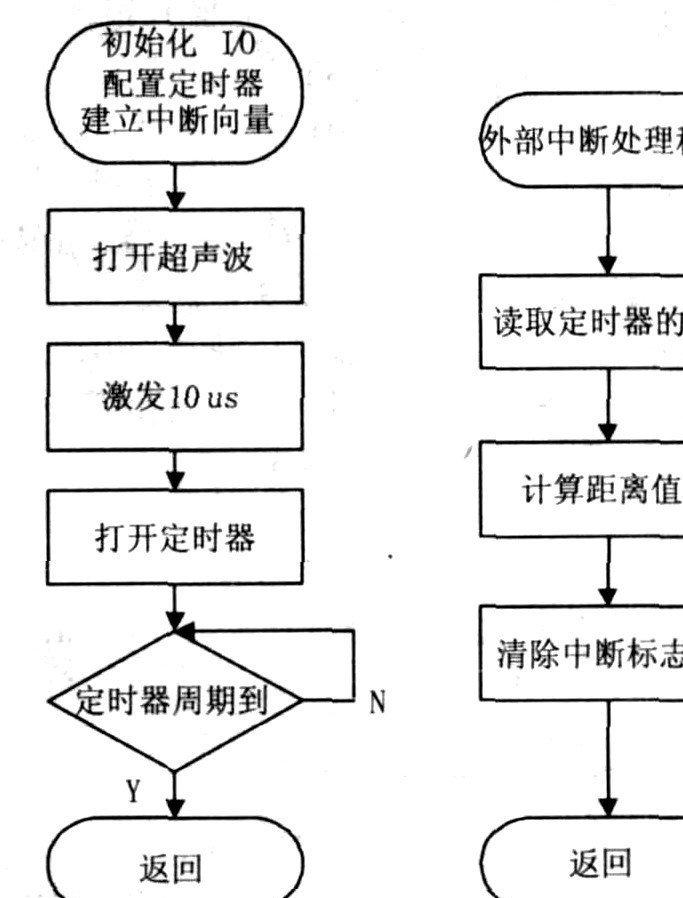
3 超声波测距软件实现
如图2 为超声波测距的流程图。
责任编辑:David
【免责声明】
1、本文内容、数据、图表等来源于网络引用或其他公开资料,版权归属原作者、原发表出处。若版权所有方对本文的引用持有异议,请联系拍明芯城(marketing@iczoom.com),本方将及时处理。
2、本文的引用仅供读者交流学习使用,不涉及商业目的。
3、本文内容仅代表作者观点,拍明芯城不对内容的准确性、可靠性或完整性提供明示或暗示的保证。读者阅读本文后做出的决定或行为,是基于自主意愿和独立判断做出的,请读者明确相关结果。
4、如需转载本方拥有版权的文章,请联系拍明芯城(marketing@iczoom.com)注明“转载原因”。未经允许私自转载拍明芯城将保留追究其法律责任的权利。
拍明芯城拥有对此声明的最终解释权。
相关资讯
:
基于MC33771主控芯片的新能源锂电池管理系统解决方案

AMIC110 32位Sitara ARM MCU开发方案

基于AMIC110多协议可编程工业通信处理器的32位Sitara ARM MCU开发方案

基于展讯SC9820超低成本LTE芯片平台的儿童智能手表解决方案

基于TI公司的AM437x双照相机参考设计

基于MTK6580芯片的W2智能手表解决方案









 2012- 2022 拍明芯城ICZOOM.com 版权所有 客服热线:400-693-8369 (9:00-18:00)
2012- 2022 拍明芯城ICZOOM.com 版权所有 客服热线:400-693-8369 (9:00-18:00)


