



 产品分类
产品分类
多种传感器协同工作,使扫地机器人智能清扫
 73
73
 拍明
拍明
原标题:多种传感器协同工作,使扫地机器人智能清扫
前些时间,石头发布了旗下两款年度旗舰,石头扫地机器人T7以及石头扫地机器人T7 Pro,作为新一代的智能清洁工具。不过这一次,笔者要和大家分享的并不是它的清洁能力,而是它的越障脱困性能和背后的传感器。
大多数家庭的房间中,或多或少都会存在落地电线、桌脚、床脚等各种障碍物。而扫地机器人必须通过底部的边刷、轮子、吸尘口进行清扫工作。那么可能遇到的状况就是——落地线缆有可能将设备缠住、被桌脚围住……这就需要扫地机器人具备足够的避障、脱困性能,才能顺利执行清扫任务。
早期的石头扫地机器人产品就已经具备了齐全的传感器
我们可以把扫地机器人理解为一个带轮子的迷你吸尘器,但带轮子、能吸尘只是成为扫地机器人最基本的要素。要想其变得智能起来,具备足够的避障、脱困性能,必须要有各种传感器的加持。
以石头扫地机器人T7 和T7 Pro为例,翻到机身底部其实可以看到,石头扫地机器人T7系列的悬崖传感器达到了6组,再配合双电子罗盘传感器、陀螺仪、加速计和跌落传感器,清扫过程中的方向性和防跌落能力势必会有所提高。
关于防跌落传感器,它主要是进行测距。当石头扫地机器人T7系列走到桌面边缘时,防跌落传感器测得扫地机器人与边缘之间的距离,到达临界值的时候石头扫地机器人便进行转向,改变前进方向来实现防跌落的效果。
除此之外,大多数扫地机器人身上还都有陀螺仪和加速度传感器,陀螺仪来测角速度,用于判断方向;加速度是测线性加速度的,用来判断速度,通过两者结合才能知道目前扫地机器人的运行状态。
还一个比较重要的是轮速计,它能精确记录轮子旋转的圈数,乘以轮子的周长,从而计算扫地机器人在工作时行进的里程,保障扫地机器人能精准的计算出自己在室内的位置变化。
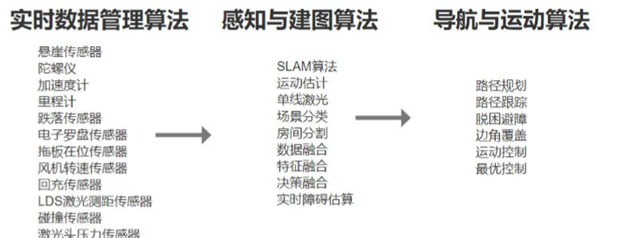
石头扫地机器人T7系列的算法也需要借助传感器来实现
值得一提的是,石头扫地机器人T7 Pro的两颗摄像头目前只用来进行AI识别和远程监控,本质上和石头扫地机器人T7一样,都要通过LDS激光测距。
LDS激光传感器还够以每秒多次的速度对周围环境进行扫描,在检测到不同时长、强弱的反射信号后,通过计算生成传感器到物体的距离信息。并通过这些距离信息建立精准地图,实现智能规划清扫路径。
此外,尘盒传感器用来感应是否尘盒归位,在尘盒归位后,传感器才会关闭,设备才可以正常工作,避免在不装尘盒设备的情况下扫地机器人空转,保护扫地机器人的核心风机不受损坏。而回充传感器位于扫地机器人正前方,可以精准锁定充电座指引信号,大幅度提升回充效率。
正是有了以上各种各样传感器的协同工作,扫地机器人才能做到像今天这般智能。
责任编辑:David
【免责声明】
1、本文内容、数据、图表等来源于网络引用或其他公开资料,版权归属原作者、原发表出处。若版权所有方对本文的引用持有异议,请联系拍明芯城(marketing@iczoom.com),本方将及时处理。
2、本文的引用仅供读者交流学习使用,不涉及商业目的。
3、本文内容仅代表作者观点,拍明芯城不对内容的准确性、可靠性或完整性提供明示或暗示的保证。读者阅读本文后做出的决定或行为,是基于自主意愿和独立判断做出的,请读者明确相关结果。
4、如需转载本方拥有版权的文章,请联系拍明芯城(marketing@iczoom.com)注明“转载原因”。未经允许私自转载拍明芯城将保留追究其法律责任的权利。
拍明芯城拥有对此声明的最终解释权。
相关资讯
:
BAT剑指科大讯飞,能否让其重蹈Nuance覆辙?

三星在中国一面撤资,一面增资是为何?

半导体激光治疗仪是骗局吗?

2016全球十大电子元器件分销商排行榜

2016年10大全球电子元器件代理商排行一览表

STM32学习笔记:通用定时器基本定时功能









 2012- 2022 拍明芯城ICZOOM.com 版权所有 客服热线:400-693-8369 (9:00-18:00)
2012- 2022 拍明芯城ICZOOM.com 版权所有 客服热线:400-693-8369 (9:00-18:00)


