



 产品分类
产品分类
智能车电磁
智能车电磁
相关文章 : 0篇
浏览 : 次
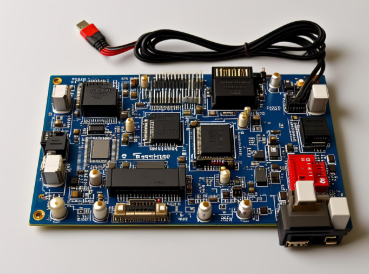
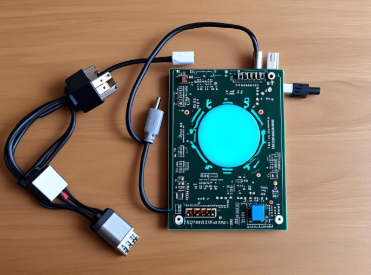
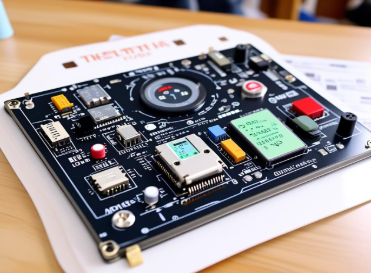
本文首先对智能车的硬件进行设计,达到了低重心、大前瞻、高稳定性。其次对系统的软件部分进行设计,利用阀值对赛道进行判断,从而得到智能车的偏航角。综合偏航角控制量实现舵机控制,人弯道切内道,大大提高了智能车的弯道运行速度。用光电编码盘检测智能车的运行速度,再根据赛道信息给定智能车的运行速度,运用一些算法调节驱动电机转速,实现了电机的快速响应。经过大量测试,最终确定系统结构和各项控制参数。
推荐产品




列表栏目














 2012- 2022 拍明芯城ICZOOM.com 版权所有 客服热线:400-693-8369 (9:00-18:00)
2012- 2022 拍明芯城ICZOOM.com 版权所有 客服热线:400-693-8369 (9:00-18:00)


