产品分类
产品分类
基于Blackfin处理器ADSP-BF533和以太网控制器DM9000AE实现嵌入式软件系统的设计方案
 85
85
 拍明
拍明
原标题:基于Blackfin处理器和DM9000AE实现嵌入式软件系统的设计方案
引言
在嵌入式系统应用越来越复杂和多样化的今天,嵌入式软件系统也变得越来越复杂,并且在复杂的应用系统中通常都需要嵌入式操作系统的支持,这样嵌入式操作系统镜像文件的尺寸往往就会变得比较大。可以选择通过网络将嵌入式操作系统加载到SDRAM中运行来解决这一问题。另外,通过网络进行操作时,只要将需要升级的软件系统在主机端更新,然后嵌入式系统就可以通过网络来加载更新后的软件系统了。
硬件电路设计
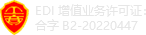
本方案所选用的基本芯片包括Blackfin处理器ADSP-BF533、以太网控制器DM9000AE等,功能框图如图1所示。
图1 系统功能框图
DM9000AE驱动
本文中所述系统的网络模块基于DM9000AE,可以与多种不同的处理器方便地进行连接。
DM9000AE 的数据读写通过两个对外可直接访问的寄存器来进行,其中INDEX port寄存器的地址=主控芯片片选基地址+0x0,DATA port寄存器的地址=主控芯片片选基地址+0x4。本系统将BF533的异步片选信号/ASM2连接至DM9000AE的片选引脚,因此本系统中 INDEX port=0x20000000,DATA port=0x20000004。
数据传输
数据传输经过以下几个步骤:
1. 检查主控芯片与DM9000AE之间使用的数据总线宽度。
2. 将数据帧写入到DM9000AE的传输FIFO SRAM中。
/*DM9000_IO=0x20000000, DM9000_DATA=0x20000004*/
DM9000_outb(0xF8, DM9000_IO); /*在设置了寄存器MWCMD后,就可以将要传输的数据写入SRAM中,并且写指针设置为自动增加*/
if(io_mode==1) /*8位模式*/
for (i = 0; i 《 TX_length; i++) /* TX_length表示待传输的数据帧长度*/
DM9000_outb(TX_data, DM9000_DATA); /*待传输的数据帧保存在数组TX_data 中*/
else if(io_mode==0) /*16位模式*/
{Length_tmp= (TX_length+1)/2;
for (i = 0; i 《 Length_tmp; i++)
DM9000_outw((u16 *) TX_data, DM9000_DATA);}
3. 在寄存器TXPLH(0xFD)和TXPLL(0xFC)中设置传输的数据帧的长度。
DM9000_iow(0xFC, TX_length & 0xff); /*将数据长度的低字节写入寄存器TXPLL */
DM9000_iow(0xFD, (TX_length 》》 8) & 0xff); /*将数据长度的高字节写入寄存器TXPLH */
4. 开始传输数据帧。
DM9000_iow(0x02, 1); /*将寄存器TCR的位0置1,向DM9000AE发出一个传输请求*/
5. 检查传输是否完成。
while (DM9000_ior(0x02) & 0x01) { /*检查寄存器TCR的位0是否为0,如果为0就表示传输完成*/
if (get_timer(0) 》=timeout) { /*检查传输是否超时*/
printf(“transmission timeout ”);
break;
}
}
数据接收
类似地,数据接收也要经过如下几个步骤:
1. 检查DM9000AE的接收FIFO SRAM中是否接收到数据。
DM9000_ior(0xF0);
RX_ready= DM9000_inb (DM9000_DATA);
/*读取数据到达标志 */
if (RX_ready == 0)
return 0; /*如果没有数据到达,就返回调用此函数的原函数*/
if (RX_ready 》 1)
reset(); /*当RX_ready 大于1时就说明DM9000AE处于异常状态,需要复位*/
当RX_ready等于1时说明有数据到达,进入第二步
2. 被接收数据帧的状态和长度检查。
(u8)io_mode= DM9000_ior (0xFE)》》7;
DM9000_outb(0xF2, DM9000_IO);
if(io_mode==1){
RX_status = DM9000_inb (DM9000_DATA)+( DM9000_inb (DM9000_DATA)《《8);
RX_length = DM9000_inb (DM9000_DATA)+( DM9000_inb (DM9000_DATA)《《8);}
else if(io_mode==0){
RX_status = DM9000_inw (DM9000_DATA);
RX_length = DM9000_inw(DM9000_DATA);}
3. 接收数据帧。
if(io_mode==1)
for (i = 0; i 《 RX_length; i++)
RX_data=DM9000_inb(DM9000_DATA);
else if(io_mode==0)
{Length_tmp= (RX_length +1)/2;
for (i = 0; i 《 Length_tmp; i++)
(u16 *) RX_data=DM9000_inw(DM9000_DATA);}
4. 对接收的数据帧进行错误检验。
if((RX_status & 0xbf00) || (RX_length 《 0x40)|| (RX_length 》 1536)) {
if (RX_status & 0x100) {
printf(“rx fifo error ”);} /*FIFO溢出错误*/
if (RX_status & 0x200) {
printf(“rx crc error ”);} /*CRC校验和错误*/
if (RX_status & 0x8000) {
printf(“rx length error ”);} /*接收的帧小于64字节*/
if (RX_length 》 1536) {
printf(“rx length too big ”); /*接收的帧大于1536字节*/
dm9000_reset();}
}
网络启动的实现
本系统是在基于BF533+ DM9000AE的嵌入式硬件平台上,通过U-Boot在自启动时使用TFTP从网络加载μclinux。
U-Boot源代码移植
DM9000AE 的驱动位于U-Boot的driver目录下,如果要使用此驱动,可以在include/configs目录下相应系统的头文件中加入宏定义语句。自定义系统可以根据基于相同体系结构的参考系统头文件来创建自己的头文件,比如,本系统以ezkit533系统为模板创建头文件 mybf533.h,并且加入以下宏定义语句:
#define CONFIG_DRIVER_DM9000 1 /*使用DM9000AE驱动*/
#define CONFIG_DM9000_DEBUG 1 /*使用debug模式*/
#define CONFIG_DM9000_BASE 0x20000000 /*基地址*/
#define DM9000_IO 0x20000000 /*IO地址*/
#define DM9000_DATA x20000004 /*数据地址*/
为了简化U-Boot系统的设置,还可以把网络参数通过宏进行定义。
TFTP相关设置
为了实现嵌入式系统在上电后自动通过TFTP从主机下载并运行μClinux操作系统,需要设置U-Boot的自启动命令。下面的命令是设置环境变量 tftp_boot,它包含的操作是通过tftp命令将文件名为uImage的文件从主机下载至目标系统的0x1000000地址处。下载完毕之后,从 0x1000000处对嵌入式操作系统解压缩并运行:
set tftp_boot ‘tftp 0x1000000 uImage;bootm 0×1000000’
接下来将tftp_boot设置为自启动命令:
set bootcmd run tftp_boot
还可以通过设置bootdelay环境变量来改变U-Boot运行自启动命令之前的等待时间。
最后要使用U-Boot的save命令来将刚才设置的环境变量保存到Flash中。
为了让目标系统能够正确地从主机中下载操作系统,要对主机的TFTP服务器进行设置,主机的IP地址必须与U-Boot中设置的服务器IP地址相同,其次是主机中文件的名字必须与U-Boot的环境变量tftp_boot中设置的文件名相同。
通过以上的设置,现在目标系统上电之后,在设定的时间之内没有任何按键的情况下,就会通过网络从主机的TFTP服务器下载并运行μClinux操作系统。
经验和建议
前面我们定义了一个宏CONFIG_DM9000_DEBUG,定义它是为了在系统调试的过程中输出程序运行的相关信息,便于跟踪系统运行和查找错误。在系统的调试阶段打开相应的调试开关是很有必要的,但是当系统完成调试准备投入正常运行的时候,为了提高整个系统的运行效率,必须关掉相应的调试开关。要去掉网络调试信息的输出,只需要把CONFIG_DM9000_DEBUG宏的定义语句注释掉就可以,对修改过的U-Boot重新编译并运行,文件的下载速度比之前有了成倍的提高。
结语
本文所讨论的内容不失一般性,可以本文为指导,在其它应用系统中实现嵌入式操作系统或者其它任何软件系统的网络加载。
责任编辑:David
【免责声明】
1、本文内容、数据、图表等来源于网络引用或其他公开资料,版权归属原作者、原发表出处。若版权所有方对本文的引用持有异议,请联系拍明芯城(marketing@iczoom.com),本方将及时处理。
2、本文的引用仅供读者交流学习使用,不涉及商业目的。
3、本文内容仅代表作者观点,拍明芯城不对内容的准确性、可靠性或完整性提供明示或暗示的保证。读者阅读本文后做出的决定或行为,是基于自主意愿和独立判断做出的,请读者明确相关结果。
4、如需转载本方拥有版权的文章,请联系拍明芯城(marketing@iczoom.com)注明“转载原因”。未经允许私自转载拍明芯城将保留追究其法律责任的权利。
拍明芯城拥有对此声明的最终解释权。
相关资讯
:
基于MC33771主控芯片的新能源锂电池管理系统解决方案

AMIC110 32位Sitara ARM MCU开发方案

基于AMIC110多协议可编程工业通信处理器的32位Sitara ARM MCU开发方案

基于展讯SC9820超低成本LTE芯片平台的儿童智能手表解决方案

基于TI公司的AM437x双照相机参考设计

基于MTK6580芯片的W2智能手表解决方案







 2012- 2022 拍明芯城ICZOOM.com 版权所有 客服热线:400-693-8369 (9:00-18:00)
2012- 2022 拍明芯城ICZOOM.com 版权所有 客服热线:400-693-8369 (9:00-18:00)