产品分类
产品分类
采用MINI2440开发板+ARM处理器S3C2440+OpenWrt的基于H桥控制的移动机器人设计方案
 87
87
 拍明
拍明
原标题:采用OpenWrt的基于H桥控制的移动机器人设计方案
引言
近年来随着人工智能技术、计算机技术等相关技术的发展,对移动机器人的研究越来越广泛。本设计是采用OpenWrt操作系统的移动机器人,它可实现多种不同功能,如探测险情、巡视、图像采集、定位、无线通信等。它还可以作为各种智能控制方法(包括动态避障、路径规划、群体协作策略)的良好载体,开展研究。
1 系统方案
采用2层架构。上层以ARM处理器S3C2440为核心,选用MINI2440开发板作为上层的主板,负责图像采集,并将图像通过Wi?Fi方式发送给远端的PC机。Wi?Fi无线通信是利用PC机与无线路由器搭建环境平台共同实现的。
下层是以51单片机为核心的单片机控制板,由51单片机及外围电路组成。下层主要负责机器人移动控制,传感器数据处理。51单片机通过I/O口输出PWM信号控制直流电机的转速和转向,实现机器人的前进、停止、左转和右转。单片机接口电路上挂接了1个超声波测距模块、1个人体红外感应模块、1个步进电机模块。超声波测距模块用来实现机器人避障。在嵌入式智能的前端安装了一个步进电机,而超声波测距模块安置在步进电机的转轴上,步进电机不停地来回转动,超声波测距模块也随之转动。这样用1个超声波测距模块就可实现多方位测距,从而减少了超声波测距模块的数量。
机器人主要由硬件系统和软件系统构成。硬件系统主要包括:ARM处理器、单片机、外围接口电路、机器人底盘以及电源等。其中ARM处理器是上层的核心,51单片机是下层的核心。软件包括:嵌入式Linux操作系统、外设驱动程序、Linux应用程序以及单片机应用程序等。系统没有选用通常的嵌入式Linux版本,而是另辟蹊径,选用一种独特的嵌入式Linux发行版之一OpenWrt作为操作系统。OpenWrt提供了一个完全可写的文件系统及软件包管理,它通过简单易用的方式,降低了嵌入式Linux开发的门槛,提高了系统软件开发的效率。
嵌入式智能移动机器人的工作流程为:传感器模块实时采集周围环境信息,将此数据信息传输到机器人控制系统中,单片机通过数据分析获取有效数据,从而获知机器人与障碍物的相对位置,然后根据此位置信息产生控制信号;单片机产生PWM信号控制直流电机来控制机器人转向,从而达到机器人自主“行走”的目的。下层的单片机与上层的ARM处理器通过串口来通信,ARM主板可将下层单片机控制板的工作数据通过无线Wi?Fi的方式传输到远端的PC机。ARM主板可以不间断地将USB摄像头采集的清晰现场图片发给远端的PC控制终端。
2 系统硬件设计
硬件系统主要包括:ARM处理器、单片机、外围接口电路、机器人底盘以及电源等,其中ARM处理器是上层的核心,51单片机是下层的核心。硬件结构框图如图1所示。
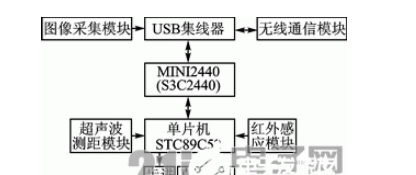
图1 硬件结构框图
由图1可以看出,系统主要由以下模块构成:图像采集模块、无线通信模块、超声波测距模块、红外感应模块、MINI2440、单片机STC89C52以及直流电机驱动模块等。下面重点介绍直流电机驱动模块。
直流电机驱动模块以L298N芯片为核心,该芯片具有带载能力强的特点。直流电机驱动电路如图2所示。驱动电路芯片的外围电路主要是由二极管构成的电桥电路与2组电机并联连接,以达到控制电机按照设定运转的目的。
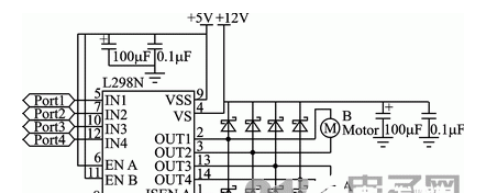
图2 直流电机驱动电路
责任编辑:David
【免责声明】
1、本文内容、数据、图表等来源于网络引用或其他公开资料,版权归属原作者、原发表出处。若版权所有方对本文的引用持有异议,请联系拍明芯城(marketing@iczoom.com),本方将及时处理。
2、本文的引用仅供读者交流学习使用,不涉及商业目的。
3、本文内容仅代表作者观点,拍明芯城不对内容的准确性、可靠性或完整性提供明示或暗示的保证。读者阅读本文后做出的决定或行为,是基于自主意愿和独立判断做出的,请读者明确相关结果。
4、如需转载本方拥有版权的文章,请联系拍明芯城(marketing@iczoom.com)注明“转载原因”。未经允许私自转载拍明芯城将保留追究其法律责任的权利。
拍明芯城拥有对此声明的最终解释权。
相关资讯
:
基于MC33771主控芯片的新能源锂电池管理系统解决方案

AMIC110 32位Sitara ARM MCU开发方案

基于AMIC110多协议可编程工业通信处理器的32位Sitara ARM MCU开发方案

基于展讯SC9820超低成本LTE芯片平台的儿童智能手表解决方案

基于TI公司的AM437x双照相机参考设计

基于MTK6580芯片的W2智能手表解决方案







 2012- 2022 拍明芯城ICZOOM.com 版权所有 客服热线:400-693-8369 (9:00-18:00)
2012- 2022 拍明芯城ICZOOM.com 版权所有 客服热线:400-693-8369 (9:00-18:00)