产品分类
产品分类
基于Cypress公司的PSoC 4200M马达控制解决方案
 136
136
 拍明
拍明
原标题:Cypress PSoC 4200M马达控制解决方案
PSoC4是一种可扩展、可重配置平台架构,面向具有ARM Cortex-M0 CPU的可编程嵌入式系统控制器。它整合了可编程和可重配置模拟与数字模块,具有灵活的自动路由功能。PSoC 4200M产品系列基于该平台架构,整合了微控制器和数字可编程逻辑、可编程模拟、可编程互联、高性能模数转换器、具有比较器模式的运算放大器以及标准通信与定时外设。PSoC 4200M产品与面向新应用和设计需求的PSoC4平台的成员完全兼容。可编程模拟和数字子系统实现了设计灵活性和现场调谐功能。
PSoC 4200M器件支持硬件和固件编程、测试、调试与跟踪。
ARM串行线调试(SWD)接口支持器件的所有编程与调试特性。
全面的片上调试功能让我们能够利用标准生产器件在最终系统中进行全器件调试。无需特殊接口、调试器、仿真器和模拟器,只需标准编程连接即可实现全面的调试支持。
PSoC Creator集成开发环境(IDE)为PSoC 4200-M器件提供了全面集成的编程与调试支持。SWD接口与行业标准第三方工具完全兼容。PSoC 4200-M系列提供了利用多芯片应用解决方案或微控制器无法实现的安全水平。这是因为它能够禁用调试特性,具有稳定的闪存保护功能,可以在片上可编程模块内实现用户专有的功能。
在默认情况下,调试电路开启,只能在固件内禁用。如果未开启,重新启用的唯一方法是擦除整个器件,清除闪存保护,利用启用调试的新固件对器件进行重编程。
此外,对于那些关心由于恶意重编程器件或试图通过起动和中断闪存编程顺序来攻破安全防线而引起的网络钓鱼攻击的应用,所有器件接口都可以永久禁用(器件安全)。因为在启用最高器件安全性时,所有编程、调试和测试接口都被禁用,所以已启用器件安全的PSoC 4200M可能不会恢复原状以供故障分析。这是PSoC 4200M能够让用户采取的折中措施。
PSoC 4200M主要特性
32位MCU子系统
具有单周期乘法功能的48MHz ARM Cortex-M0 CPU
具有读加速器的128kB闪存
16kB SRAM
DMA引擎
可编程模拟
4个运算放大器,能够以极低的电流水平在深度睡眠模式下运行
所有运算放大器均具有可重配置大电流引脚驱动、高带宽内部驱动、ADC输入缓冲和比较器模式,连接灵活,能够将输入连至任何引脚
任何引脚上都具有4个面向通用或电容感应应用的电流DAC(IDAC)
2个低功耗比较器,能够在深度睡眠模式下运行
转换速率达1Msps的12位SAR ADC
可编程数字
4个可编程逻辑模块,每个都具有8个宏单元和1个8位数据通路(即通用数字模块或UDB)
cypress提供的外设元件库、用户定义状态机和Verilog输入
1.71V~5.5V低功耗操作
具有GPIO引脚唤醒功能的20nA停止模式
休眠和深度睡眠模式实现了唤醒时间与功率折中
电容感应
Cypress电容Sigma-Delta(CSD)技术提供了同类中最佳的SNR(>5:1)和耐水性
Cypress提供的软件元件让电容感应设计变得很简单
启动硬件调谐(SmartSense)
段式LCD驱动
所有引脚上均支持LCD驱动(普通或段式)
在深度睡眠模式下运行
串行通信
4个具有可重配置I2C、SPI或UART功能的独立运行时间可重配置串行通信模块(SCB)
2个用于实现工业和汽车联网功能的独立CAN模块
定时和脉宽调试
8个16位定时器/计数器脉宽调制器(TCPWM)模块
中心对齐、边沿和伪随机模式
在比较器的基础上为马达驱动和其它高可靠性数字逻辑应用触发Kill信号
封装选项
68引脚QFN、64引脚TQFP宽与窄间距和48引脚TQFP封装
55个可编程GPIO
GPIO引脚可以是CapSense、LCD、模拟或数字的
驱动模式、强度和转换速率均可编程
PSoC Creator设计环境
集成开发环境(IDE)提供了原理图设计(具有模拟和数字自动路由功能)
面向所有固定功能和可编程外设的应用编程接口(API元件)
行业标准工具兼容性
输入原理图之后,开发可以利用基于ARM的行业标准开发工具来完成

图1 PSoC 4200M框图
PSoC4马达控制评估板CY8CKIT-037
CY8CKIT-037 PSoC4马达控制评估套件旨在实验室环境中用作面向硬件或软件的马达控制开发平台。该电路板是一种开放式系统设计,不包含屏蔽室。因此,该电路板可能会干扰附近的其它电气或电子器件。在室内环境下,该产品可能会产生无线电干扰。这种情况下,用户可能需要采取充分的预防措施。另外,该电路板不得在任何医疗设备或RF器件附近使用。
该套件让工程师能够评估Cypress PSoC系列面向马达控制应用的器件。在该套件的基础上,用户能为3大类马达创建控制解决方案:永磁同步马达(PMSM)、步进马达和无刷DC(BLDC)马达。
马达控制系统可以划分为2部分:驱动器板和控制器板。CY8CKIT-037马达控制EVK属于驱动器板,包含DC/DC电源电路、双H桥电路、马达电流和总线电压采样与处理电路、保护电路、用户配置电路和控制器板连接器。控制器板接收信号,运行适当的算法来处理信号,然后产生控制信号并发送给驱动器板来操作马达。EVK板及其说明见图3-1。CY8CKIT-037 EVK属于驱动器板,CY8CKIT-042套件则充当控制器板。它们与Arduino兼容型连接器相连。
CY8CKIT-037 PSoC 4马达控制EVK包含下列内容:
CY8CKIT-037 PSoC 4马达控制EVK主板
AC-DC 24 V/2.0 A电源适配器
具有正弦逆电动势的BLY172S-24V-4000 BLDC马达
USB-A至mini-B电缆
配置跳线器
螺丝刀
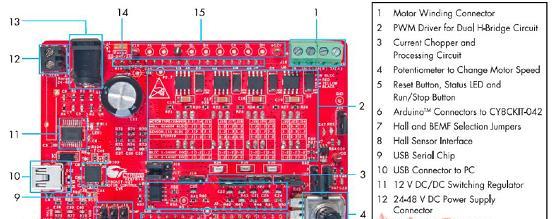
图2 PSoC 4马达控制评估板CY8CKIT-037外形图
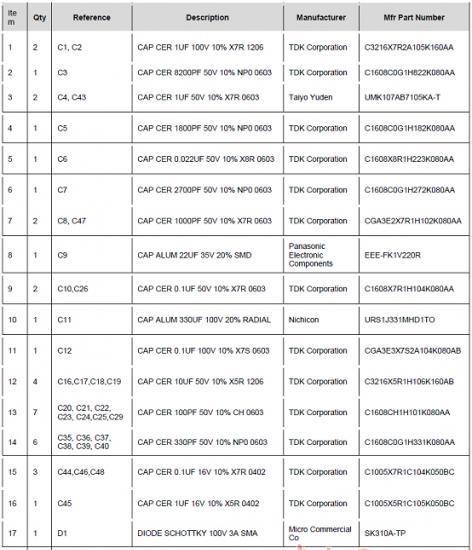
表1 PSoC 4马达控制评估板CY8CKIT-037材料清单
责任编辑:HanFeng
【免责声明】
1、本文内容、数据、图表等来源于网络引用或其他公开资料,版权归属原作者、原发表出处。若版权所有方对本文的引用持有异议,请联系拍明芯城(marketing@iczoom.com),本方将及时处理。
2、本文的引用仅供读者交流学习使用,不涉及商业目的。
3、本文内容仅代表作者观点,拍明芯城不对内容的准确性、可靠性或完整性提供明示或暗示的保证。读者阅读本文后做出的决定或行为,是基于自主意愿和独立判断做出的,请读者明确相关结果。
4、如需转载本方拥有版权的文章,请联系拍明芯城(marketing@iczoom.com)注明“转载原因”。未经允许私自转载拍明芯城将保留追究其法律责任的权利。
拍明芯城拥有对此声明的最终解释权。
相关资讯
:
基于MC33771主控芯片的新能源锂电池管理系统解决方案

AMIC110 32位Sitara ARM MCU开发方案

基于AMIC110多协议可编程工业通信处理器的32位Sitara ARM MCU开发方案

基于展讯SC9820超低成本LTE芯片平台的儿童智能手表解决方案

基于TI公司的AM437x双照相机参考设计

基于MTK6580芯片的W2智能手表解决方案







 2012- 2022 拍明芯城ICZOOM.com 版权所有 客服热线:400-693-8369 (9:00-18:00)
2012- 2022 拍明芯城ICZOOM.com 版权所有 客服热线:400-693-8369 (9:00-18:00)