



 产品分类
产品分类
基于STM32处理器+SYN6288语音芯片+SIM808GPS传感器模块的智能导盲拐杖设计方案
 122
122
 拍明
拍明
原标题:基于STM32的智能导盲拐杖设计方案
引 言
目前,市场上的导盲拐杖功能单一,无法满足盲人的需求。盲人外出时会遇到各种情况,如遇到障碍物,不清楚路况, 或者因为监护人不在而走丢等。因此,本文利用现代已有技术, 研究出一种新型导盲系统,通过软硬件结合,实现障碍物避障功能,语音提示功能,语音报时功能,角度测量防摔功能以及GPS定位功能,以帮助盲人解决出行时遇到的问题。
1 总体设计方案
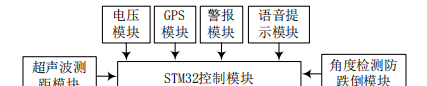
本系统所构建的基于STM32 处理器的电子导盲系统主要针对盲人这一特殊人群所设计,旨在方便盲人出行,为其创造一个更加安全的环境。通过综合应用STM32 控制、超声波测距、角度测量、GPS 定位等技术来实现。STM32 控制为主控制电路 ;超声波模块可时时测量盲人在行走时前方是否有障碍物,并通过语音提示对盲人进行提醒 ;在盲人跌倒时,警报模块迅速发出声音,警示监护人;使用 GPS 进行定位,为监护人寻找盲人提供了有利条件,同时也为盲人提供了诸多方便。导盲拐杖整体设计图如图 1 所示。
2 模块设计
2.1 主控制器选择
本导盲系统采用STM32 作为主要的控制电路,STM32 控制器相较于 51 单片机,拥有主频率更高、处理能力更强、耗能低、成本低等特点,是一款性价比较高的嵌入式处理器。同时还具有 PWM、DA、AD 等常用外设,使用方便,只需32.768 kHz 的晶振频率和 3 V 的电压即可工作。
2.2 超声波避障模块设计
利用超声波避障的好处在于测量方式简单,易于实现, 成本低,覆盖面广。超声波避障模块的原理与雷达测物的原理极为相似,超声波发射器从某一方向发射超声波,在发射的同时开始计时,超声波在空气中传播,途中碰到障碍物时发出的超声波会立即返回,超声波接收器接收被反射回的超声波则计时停止。由 s=tv/2就可计算出障碍物的距离。本设计采用HC-SR04超声波传感器,该模块性能稳定,测距精准。
STM32 主控制电路发送 40 kHz 的脉冲信号,超声波发射器发射信号后,经超声波换能器处理后转换为超声波信号, 当探测到前方的障碍物时,将超声波所测得的距离发送给语音模块,从而提醒盲人成功避开障碍物。
2.3 角度测量防摔模块
角度测量防摔模块应用角度传感器来测量角度。当盲人行走,由于地面不平导致盲人身体倾斜或将摔倒时,当角度探测小于 30 ,则认为盲人即将摔倒,角度测量器把信息传给警报模块,警报模块发出警报,通知监护人,由监护人迅速将盲人扶稳。
2.4 警报模块
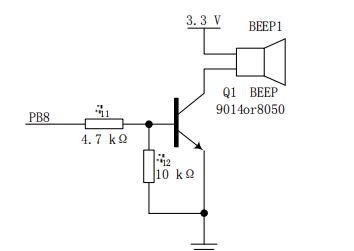
警报模块将蜂鸣器与角度测量模块相结合,为监护人提供盲人的信息。当角度测量器检测到拐杖的角度小于 30 时, 此时,STM32 主控制电路启动蜂鸣器,提醒监护人。蜂鸣器电路如图 2 所示。
2.5 GPS模块设计
GPS 技术从根本上解决了定位问题。由卫星不间断地发送自身星历参数和时间信息,用户接收到信息后,经计算,求出接收机的三维位置、三维方向以及运动速度和时间信息。
在设计 GPS 模块 时, 考虑到定位的精确性, 选用SIM808GPS 传感器模块。此模块的优点在于覆盖范围广,开发板设计小, 易于安装, 模块主要包括主机、接收机和电源三部分。电源模块主要与 STM32 主处理器相连, 通过STM32 为其供电,可使GPS 模块正常使用;接收机主要接收经纬度信息,将数据发送至主机。通过接收到的经纬度信息判断盲人所处的具体位置。
2.6 语音提示模块
考虑到产品的对象为盲人,因此本设计加入语音提示模 块及语音时间播报功能,主要对盲人进行语音提醒。语音模 块与超声波测距模块相结合,可时刻提醒盲人前方障碍物的 情况。由于盲人在出行时无法知道时间,因此设计有定时播报 时间。语音芯片采用 SYN6288 中文芯片,此芯片具有低功耗, 接口简单,性价比高等优点。STM32 主控制器的串行接口与 SYN6288 语音芯片通信,对其发送控制命令和文本,然后语 音芯片将接收到的文本合成为语音芯片信号输出。
2.7 电源模块
电源模块主要是为整个导盲系统提供电源,使其可正常工作。在设计电源模块时,由于 GPS 耗电量较大,不仅要考虑节能,还要考虑用电量的问题,因此采用可充电的镍镉电池。
3 软件设计
3.1 超声波检测流程图
超声波测距是本系统的一个重要部分,其测距软件流程如图 3 所示。
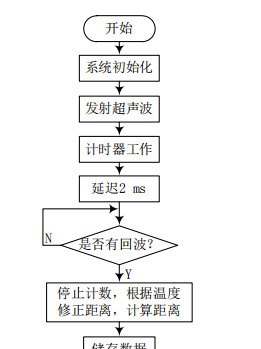
先将系统初始化,启动超声波模块发射超声波,同时计时器开始计时,看接收器能否接收到回波,若没有接收到回波, 则继续采集数据,计数器继续工作 ;若接收到回波,则计数器 停止工作,并将数据传递给计算器,由于超声波模块测距与 温度有关,因此需要在存储数据前对其进行温度修正,方可得 到比较精确的距离。
3.2 跌倒检测告警流程图
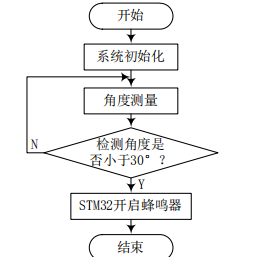
为防止盲人将跌倒时监护人未发现的情况出现,在程序中 设定了相应程序,即盲人在行走时,角度测量器判断拐杖的角 度是否小于 30°,若不小于则继续测量,若小于 30°,则认为 盲人将摔倒,此时 STM32 主处理器启动蜂鸣器,从而使监护 人迅速意识到盲人的情况。图 4 所示为角度检测流程图。
4 结语
本系统的优点在于角度传感器可检测拐杖状态,当盲人不慎摔倒时,系统立即启动蜂鸣器告知盲人当前的情况,使监护人迅速反应搀扶盲人。当遇到障碍物时通过超声波测算障碍物距离进行语音提示,提示盲人自身位置与障碍物间的距离,通过GPS 对盲人进行精确定位,从而获得盲人的精确位置,防止其走丢。本设计具有成本低,障碍物检测精度高,跌摔检测可靠等优点,可满足盲人朋友的需求,便于推广使用。
责任编辑:David
【免责声明】
1、本文内容、数据、图表等来源于网络引用或其他公开资料,版权归属原作者、原发表出处。若版权所有方对本文的引用持有异议,请联系拍明芯城(marketing@iczoom.com),本方将及时处理。
2、本文的引用仅供读者交流学习使用,不涉及商业目的。
3、本文内容仅代表作者观点,拍明芯城不对内容的准确性、可靠性或完整性提供明示或暗示的保证。读者阅读本文后做出的决定或行为,是基于自主意愿和独立判断做出的,请读者明确相关结果。
4、如需转载本方拥有版权的文章,请联系拍明芯城(marketing@iczoom.com)注明“转载原因”。未经允许私自转载拍明芯城将保留追究其法律责任的权利。
拍明芯城拥有对此声明的最终解释权。
相关资讯
:
基于MC33771主控芯片的新能源锂电池管理系统解决方案

AMIC110 32位Sitara ARM MCU开发方案

基于AMIC110多协议可编程工业通信处理器的32位Sitara ARM MCU开发方案

基于展讯SC9820超低成本LTE芯片平台的儿童智能手表解决方案

基于TI公司的AM437x双照相机参考设计

基于MTK6580芯片的W2智能手表解决方案









 2012- 2022 拍明芯城ICZOOM.com 版权所有 客服热线:400-693-8369 (9:00-18:00)
2012- 2022 拍明芯城ICZOOM.com 版权所有 客服热线:400-693-8369 (9:00-18:00)


