



 产品分类
产品分类
基于树莓派pico的线跟随机器人设计
 9
9
 拍明
拍明
原标题:基于树莓派pico的线跟随机器人设计
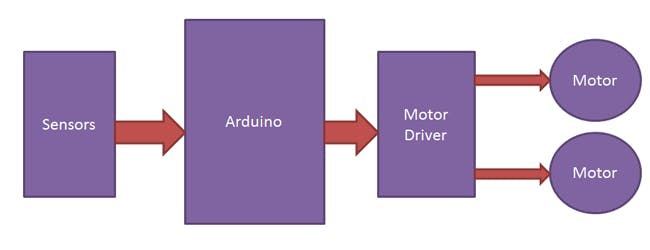
整个PiPico线跟随机器人可以分为3个部分:传感器部分、控制部分和驱动部分。
传感器部分:
本部分包含 IR 二极管、电位计、比较器(运算放大器)和 LED。电位器用于设置比较器一端的参考电压,IR 传感器用于检测线路并提供比较器第二端的电压变化。然后比较器比较两个电压并在输出端生成数字信号。在这个线路跟随器电路中,我们为两个传感器使用了两个比较器。LM 358 用作比较器。LM358 内置了两个低噪声运算放大器。
使用 Pi Pico 的 Line Follower Robot 工作
与线追随者一起工作非常有趣。Line Follower 机器人通过传感器感应到黑线,然后将信号发送给 Pico。然后 pico 根据传感器的输出驱动电机。
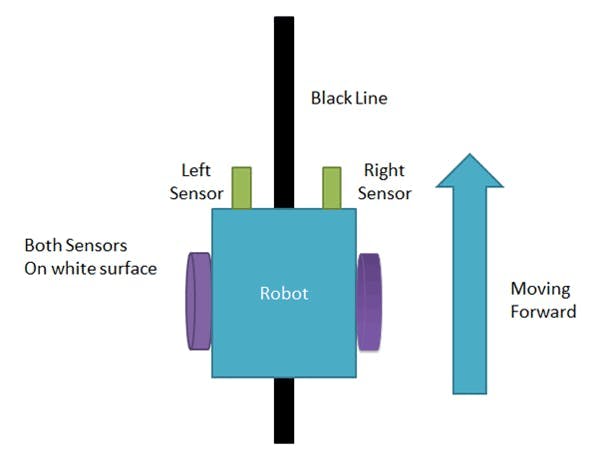
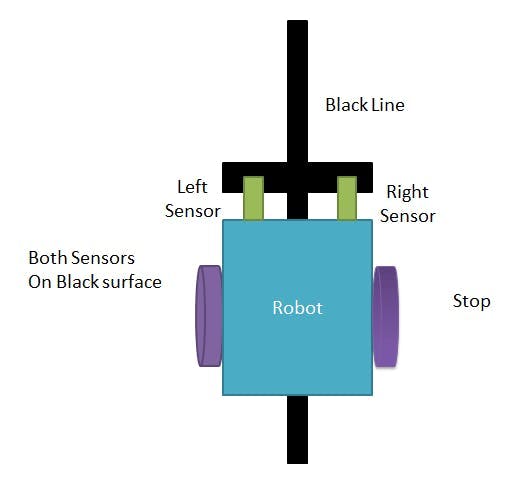
该项目使用两个红外传感器模块,即左传感器和右传感器。当左右传感器都感应到白色时,机器人向前移动。
如果左侧传感器位于黑线上,则机器人转向左侧。
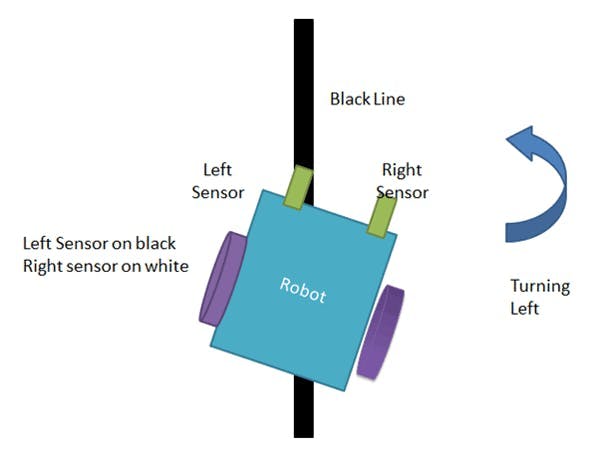
如果右侧传感器检测到黑线,则机器人转向右侧,直到两个传感器都位于白色表面。当白色表面出现时,机器人开始再次向前移动。
如果两个传感器都位于黑线上,则机器人停止。
责任编辑:
【免责声明】
1、本文内容、数据、图表等来源于网络引用或其他公开资料,版权归属原作者、原发表出处。若版权所有方对本文的引用持有异议,请联系拍明芯城(marketing@iczoom.com),本方将及时处理。
2、本文的引用仅供读者交流学习使用,不涉及商业目的。
3、本文内容仅代表作者观点,拍明芯城不对内容的准确性、可靠性或完整性提供明示或暗示的保证。读者阅读本文后做出的决定或行为,是基于自主意愿和独立判断做出的,请读者明确相关结果。
4、如需转载本方拥有版权的文章,请联系拍明芯城(marketing@iczoom.com)注明“转载原因”。未经允许私自转载拍明芯城将保留追究其法律责任的权利。
拍明芯城拥有对此声明的最终解释权。
相关资讯
:
基于MC33771主控芯片的新能源锂电池管理系统解决方案

AMIC110 32位Sitara ARM MCU开发方案

基于AMIC110多协议可编程工业通信处理器的32位Sitara ARM MCU开发方案

基于展讯SC9820超低成本LTE芯片平台的儿童智能手表解决方案

基于TI公司的AM437x双照相机参考设计

基于MTK6580芯片的W2智能手表解决方案









 2012- 2022 拍明芯城ICZOOM.com 版权所有 客服热线:400-693-8369 (9:00-18:00)
2012- 2022 拍明芯城ICZOOM.com 版权所有 客服热线:400-693-8369 (9:00-18:00)


