



 产品分类
产品分类
基于STC89C52芯片和HS0038红外接收探头+DS18B20传感器+LCD1602显示的红外通信系统设计方案
 18
18
 拍明
拍明
原标题:基于STC89C52芯片和HS0038红外接收探头的红外通信系统设计方案
大家好,又和大家见面了,离上一次DS18B20传感器的文章已经过去了一个星期了,这期我将给大家带来,基于STC89C52芯片和HS0038红外接收探头的红外通信实验
红外通信
红外遥控电路的组成
信号调制和解调 及 红外编码协议和解码
NEC协议
数据码
红外遥控电路的组成
在我们生活当中,红外遥控系统由发射装置和接收装置两大部分组成,也就是遥控器(包括键盘电路、红外编码芯片、电源(我们今天使用的就是一颗小小的纽扣电池)还有红外发射电路)和被遥控的物品(智能灯,风扇,空调,电视等等)
而红外接收设备可由红外接收电路、红外解码芯片、电源还有应用电路组成,今天我们将开发板和红外接收探头组合成为红外接收电路、而STC89C52用来当作解码芯片

此为红外通信流程图,其实很简单,并没有那么复杂,也就是遥控器发射红外线,被控制的物品接收红外线做我们人类编程程序中的任务。红外线肉眼不可见,但只要我们拿手机摄像头对准遥控器的发射端,就能看见一个紫光
这就是我们今天要用的遥控器啦
我们要用的HS0038长这个样子
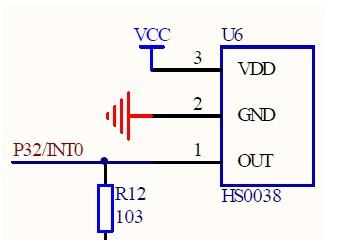
我使用的清翔51单片机将HS0038的out口接到了P3^2这个IO口上,也就是我们熟悉的INT0(外部中断0),所以我们要通过编写中断程序来接收红外线携带的“1”和“0”。
因此,在红外通信的时候我们并不需要sbit IO口,只需要利用好中断服务程序就行。
接下来我们就要开始讲信号的调制和解调及红外编码协议及解码
信号调制和解调 及 红外编码协议和解码
通常为了使信号能够更好的被传输,发送端会将基带二进制信号调制为脉冲串信号,通过红外发射管发射

这样可以让单片机更容易区分数据“0”和“1”的脉冲时间,来通过变化的脉冲时间来识别这到底是数据“0”位还是数据“1”位
因此,我们引入一个NEC协议,让大家更好的了解如何将红外发射的信号接收和识别出来
NEC协议
数据格式:以下是发射端的方波图,接收端的刚好与其相反,数据的传输从最低位开始,所以我们要编写正确的程序识别数据

大家也可以从这张图看到,其中引导码是我们不需要的,我们主要需要的是数据码,通过数据码的识别来控制单片机上的小灯或者其他东西
NEC标准下的编码表示
其中:引导码高电平约9000us 左右,低电平约4500us 左右;
用户码16 位,数据码16 位,共32位;
数据0 是用“高电平约560us +低电平约560us”表示。
数据1 可用“高电平约560us+低电平约1680us”表示。

因此,我们可以通过不同的脉冲宽度来识别是“0”还是“1”
这里我们就要用到一个定时中断函数和中断服务程序来增加时间,好让我们接收正确的脉冲宽度并且识别出来
void Init_timer0() { EA = 1; TR0 = 1; TMOD = 0X02; //八位自动重装 ET0 = 1; TH0 = 0; TL0 = 0; } void timer0() interrupt 1 { time_num++; //256us } 这是我的定时中断函数及中断服务程序,其中,每隔256us就会进一次中断函数,并且让我的计时变量time_num加1,这样我们就很容易接收正确的脉冲宽度了。
例如:数据0的脉冲宽度是1.12ms(如图)数据1的脉冲宽度就是2.25ms
我们只需要用2250/256 = 8.78 及我们只需要判断我们接收的时间是不是大于7,如果大于7,就认为我们接收到的数据是1,这样我们就可以成功的接收32位数据,也就是四个字节。
接下来就是看代码的时候啦,学到红外通信的小伙伴应该不缺乏看代码能力和理解能力,当然大家不懂的都可以私信博主,我会一一为大家解答的哦。
#include《reg52.h》 #define uchar unsigned char #define uint unsigned int sbit RS = P3^5; sbit RW = P3^6; sbit EN = P3^4; sbit dula = P2^6; sbit wela = P2^7; sbit LED1 =P1^0; uchar time_num,extern_num; uchar timerecord[33]; uchar cord[4]; uchar flag_ok; uchar count; /* LCD1602 */ void Read_Busy() { uchar busy; P0 = 0XFF; //将P0复位 RS = 0; RW = 1; do { EN = 1; busy = P0; EN = 0; //以便下一次产生上升沿 }while(busy & 0x80); } void LCD_Write_cmd(uchar cmd) //写入操控lcd的指令 { Read_Busy(); RS = 0; RW = 0; P0 = cmd; EN = 1; EN = 0; } void LCD_Write_dat(uchar dat) { Read_Busy(); RS = 1; RW = 0; P0 = dat; EN = 1; EN = 0; } void LCD_Init() { LCD_Write_cmd(0x38); LCD_Write_cmd(0x0c); LCD_Write_cmd(0x06); LCD_Write_cmd(0x01); } /* LCD1602 */ void Init_INT0() { EA = 1; EX0 = 1; IT0 = 1; } void Init_timer0() { EA = 1; TR0 = 1; TMOD = 0X02; //八位自动重装 ET0 = 1; TH0 = 0; TL0 = 0; } void processing_jiema() { uchar i,j,k = 1,jiema; for(j=0;j《4;j++) { for(i=0;i《8;i++) { jiema 》》= 1; if(timerecord[k] 》 6) { jiema|=0x80; } k++; } cord[j] = jiema; // jiema = 0; //可写可不写 } } void LCD1602_Display() { uchar i; LCD_Write_cmd(0x80+0x04); //第一行第五个 for(i=0;i《4;i++) { if(cord/16《10) { LCD_Write_dat(cord/16 + 0x30); } else { LCD_Write_dat(cord/16 + 0x37); } if(cord%16《10) { LCD_Write_dat(cord%16 + 0x30); } else { LCD_Write_dat(cord%16 + 0x37); } } } void main() { Init_INT0(); Init_timer0(); LCD_Init(); dula = 0; wela = 0; while(1) { if(flag_ok == 1) { processing_jiema(); LCD1602_Display(); flag_ok = 0; } switch(cord[2]) { case 0x0c:LED1 = 0; break; case 0x18:LED1 = 1; break; } } } void INT_0() interrupt 0 { extern_num++; if(extern_num == 1) { time_num = 0; } else { if(time_num 》 32) //起始码判断 { count = 0; } timerecord[count] = time_num; //第一个是起始码,不需要 time_num = 0; count++; if(count == 33) { extern_num = 0; flag_ok = 1; } } } void timer0() interrupt 1 { time_num++; //256us } /* 1码的脉冲宽度为2.25ms 0码的脉冲宽度为1.12ms 起始码的脉冲宽度为9ms */ 在我的代码中,我用了LCD1602来显示接收到的32位数据,这样我就可以知道按键的各个部分的数据码是什么,通过数据码的识别来控制小灯的亮和熄灭。
责任编辑:David
【免责声明】
1、本文内容、数据、图表等来源于网络引用或其他公开资料,版权归属原作者、原发表出处。若版权所有方对本文的引用持有异议,请联系拍明芯城(marketing@iczoom.com),本方将及时处理。
2、本文的引用仅供读者交流学习使用,不涉及商业目的。
3、本文内容仅代表作者观点,拍明芯城不对内容的准确性、可靠性或完整性提供明示或暗示的保证。读者阅读本文后做出的决定或行为,是基于自主意愿和独立判断做出的,请读者明确相关结果。
4、如需转载本方拥有版权的文章,请联系拍明芯城(marketing@iczoom.com)注明“转载原因”。未经允许私自转载拍明芯城将保留追究其法律责任的权利。
拍明芯城拥有对此声明的最终解释权。
相关资讯
:
基于MC33771主控芯片的新能源锂电池管理系统解决方案

AMIC110 32位Sitara ARM MCU开发方案

基于AMIC110多协议可编程工业通信处理器的32位Sitara ARM MCU开发方案

基于展讯SC9820超低成本LTE芯片平台的儿童智能手表解决方案

基于TI公司的AM437x双照相机参考设计

基于MTK6580芯片的W2智能手表解决方案









 2012- 2022 拍明芯城ICZOOM.com 版权所有 客服热线:400-693-8369 (9:00-18:00)
2012- 2022 拍明芯城ICZOOM.com 版权所有 客服热线:400-693-8369 (9:00-18:00)


