



 产品分类
产品分类
DIY Arduino机器人手臂,手势控制
 11
11
 拍明
拍明
原标题:DIY Arduino机器人手臂,手势控制
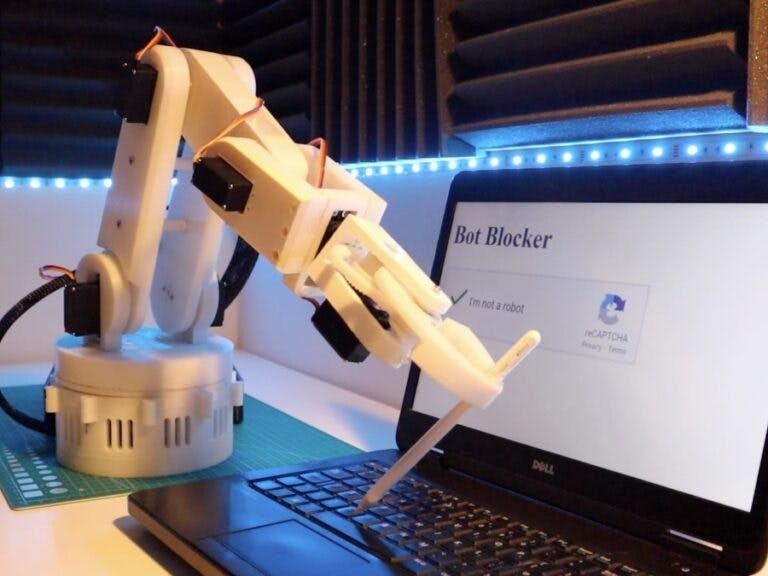



MARK 1是可编程的Arduino机器人手臂。但是,还不止这些,该机械臂可以由手势控制。
硬件部件:
Arduino UNO × 1个
伺服马达MG996R× 6
5V电池组× 1个
PCA9685具有I2C接口的8通道8W 12V FET驱动器比例阀控制器 × 1个
HC-05蓝牙模块 × 2
步进电机驱动板A4988 × 1个
NEMA-17步进电机× 1个
面包板(通用)× 1个
惯性测量单元(IMU)(6个自由度) × 1个
Arduino Nano R3 × 1个
柔性传感器× 1个
手动工具和制造机:
3D打印机(通用)
这是一个可以通过手势进行编程甚至控制的Arduino机器人手臂。

严格按照钢铁侠的取名惯例,每次迭代都称为Mark。该原型将被称为MARK1。我们可以期望在原始机械臂上有更多的迭代可以改进。
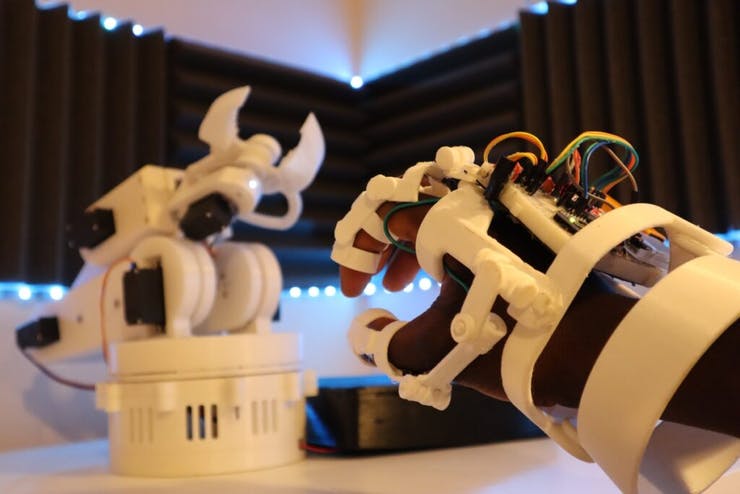
完整的DIY机器人手臂(由手势控制)教程:在本教程中,我们将使用机器人手套构建一个由手势控制的六轴机器人。通过模仿自然的手势,例如捏或向左旋转手腕,您将能够分别向左和向右打开/关闭或旋转机械臂。实际上,是手动控制机械臂。
机械臂功能列表:

MARK 1特点:
6轴旋转
随身携带
用人的手势控制机器人
可以预先编程以执行基本功能
可以从多个范围进行无线控制
可以承受600g的负载重量(最大负载1kg)
责任编辑:
【免责声明】
1、本文内容、数据、图表等来源于网络引用或其他公开资料,版权归属原作者、原发表出处。若版权所有方对本文的引用持有异议,请联系拍明芯城(marketing@iczoom.com),本方将及时处理。
2、本文的引用仅供读者交流学习使用,不涉及商业目的。
3、本文内容仅代表作者观点,拍明芯城不对内容的准确性、可靠性或完整性提供明示或暗示的保证。读者阅读本文后做出的决定或行为,是基于自主意愿和独立判断做出的,请读者明确相关结果。
4、如需转载本方拥有版权的文章,请联系拍明芯城(marketing@iczoom.com)注明“转载原因”。未经允许私自转载拍明芯城将保留追究其法律责任的权利。
拍明芯城拥有对此声明的最终解释权。
相关资讯
:
基于MC33771主控芯片的新能源锂电池管理系统解决方案

AMIC110 32位Sitara ARM MCU开发方案

基于AMIC110多协议可编程工业通信处理器的32位Sitara ARM MCU开发方案

基于展讯SC9820超低成本LTE芯片平台的儿童智能手表解决方案

基于TI公司的AM437x双照相机参考设计

基于MTK6580芯片的W2智能手表解决方案









 2012- 2022 拍明芯城ICZOOM.com 版权所有 客服热线:400-693-8369 (9:00-18:00)
2012- 2022 拍明芯城ICZOOM.com 版权所有 客服热线:400-693-8369 (9:00-18:00)


