



 产品分类
产品分类
基于下垂控制的微电网并网预同步控制策略
 74
74
 拍明
拍明
原标题:基于下垂控制的微电网并网预同步控制策略
微电网存在并网和孤岛两种运行模式。当微电网孤岛运行时,由于微电网中起支撑作用的电压源型逆变器(VSI)按照下垂特性工作,微电网电压会与大电网电压产生偏离,重并网过程中两者间的同步问题是实现微电网运行模式无缝切换的关键。本文借鉴三相软件锁相环(SPLL)的思想,提出一种基于下垂控制的微电网并网预同步控制策略,通过此控制策略实现微电网电压与大电网电压的同步,从而避免了并网过程的冲击电流,终实现微电网系统由孤岛模式到并网模式的无缝切换。论文通过仿真和实验验证了控制策略的有效性。
1. 引言
微电网是由负载和多个单体微电源组成的供电网络系统,三相逆变器是其中主要的接口单元,基于下垂(droop)控制策略的微电网逆变器,输出呈现电压源的特性,能够为孤岛运行模式下的微电网提供电压和频率支撑,且易于实现微电源和负荷的即插即用以及微电网运行模式的无缝切换,因此在国内外获得了广泛的研究和应用[1]。
微电网孤岛运行时,由于下垂控制作用,其电压会与大电网电压产生偏离,直接重合闸并网可能引起巨大的冲击电流,造成设备损坏,所以微电网并网前,必须考虑采取一定的预同步控制措施,保证微电网电压与大电网电压的同步[2].文献[3]建立了微电网运行模式切换时刻的数学模型,分析得出并网时刻微电网和大电网两者电压的相位差是导致并网电流冲击的主要原因。文献[4]提出一种基于两相静止坐标系的并网预同步控制方法,但不能直接适用于基于旋转坐标系的微电网下垂控制策略。
本文立足于d-q 旋转坐标系,提出了一种基于下垂控制的微电网并网预同步控制策略。通过此控制策略实现微电网电压对大电网电压的相位追踪与同步,保证了微电网由孤岛运行模式到并网运行模式的无缝切换。本文在分析下垂控制策略原理的基础上,详细介绍了并网预同步控制的实现方法,理论分析和实验结果表明此种预同步控制策略能与下垂控制中基于d-q 坐标系的瞬时功率理论良好的结合,并且具有良好的快速性和稳定性。
本文立足于d-q 旋转坐标系,提出了一种基于下垂控制的微电网并网预同步控制策略。通过此控制策略实现微电网电压对大电网电压的相位追踪与同步,保证了微电网由孤岛运行模式到并网运行模式的无缝切换。本文在分析下垂控制策略原理的基础上,详细介绍了并网预同步控制的实现方法,理论分析和实验结果表明此种预同步控制策略能与下垂控制中基于d-q 坐标系的瞬时功率理论良好的结合,并且具有良好的快速性和稳定性。
2. 下垂控制策略原理分析
图1 为微电网中2 台逆变器并联运行的简化原理图。设逆变器1 的输出阻抗Zo1∠φo1 与连线阻抗Zc1∠φc1 之和为Z1∠φZ1,逆变器2 的输出阻抗Zo2∠φo2与连线阻抗Zc2∠φc2 之和为Z2∠φZ2。每台逆变器的输出电压为Vn∠φn,输出电流为Ion(n=1,2)。微电网母线电压为V∠0.IH 为两台逆变器之间的环流[5]。
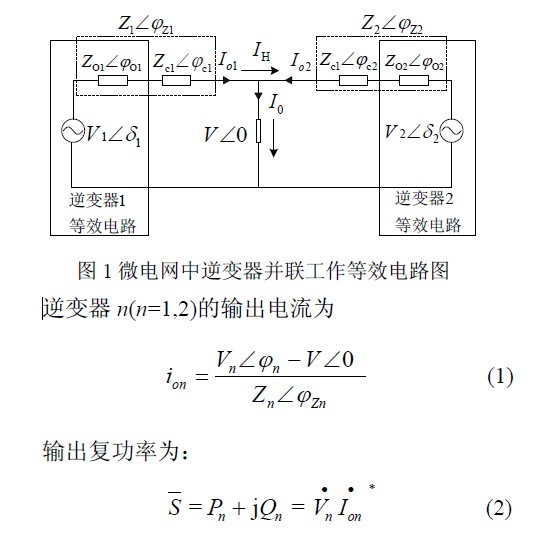

由上述两式分析可得:逆变器n 输出的有功功率Pn 主要取决于电压相角φn;无功功率Qn 主要取决于逆变器输出电压的幅值Vn。因此就可以通过控制电压相位φn 调节有功功率Pn,控制电压幅值Vn 调节无功功率Qn,由于相位φn 不易检测,通常用角频率ωn 代替,即下垂特性:
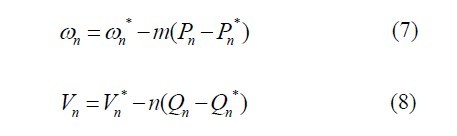
式中,Pn*为逆变器n 输出的额定有功功率,Qn*为逆变器n 输出的额定无功功率;m,n 为逆变器的下垂系数。
3. 并网预同步控制策略
本文提出的基于下垂控制的微电网并网预同步控制策略结构如图2 所示。

并网预同步控制单元如虚线框中所示:首先通过三相软件锁相环 (SPLL)技术获得电网电压相位θg,角频率ωg,幅值Eg,此处所得电网电压信息还可以在系统其它功能算法中获得应用。
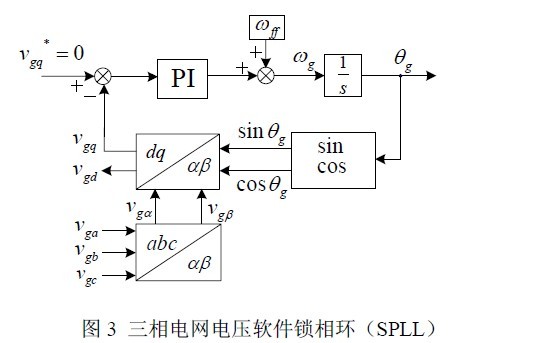
三相软件锁相环是一个能够自动跟踪输入信号频率与相位的闭环控制系统,其原理如图3 所示,三相电网电压νga,νgb,νgc 先后经过CLACK 变换和PARK变换得到两相旋转坐标系下的电压νgd 和νgq,其中PAKE 变换使用的参考相位为锁相环的输出相位θg,然后将PARK 变换的q 轴分量νgq 与零参考做PI 调节,PI 调节器的输出角频率与固有角频率ωff(一般取为电网电压额定角频率100π)相加得到输出角频率ωg,再经过一个积分环节后即可得到终的输出相位θg,经过如上所述的负反馈调节,终得到锁相环输出相位角θg 与输入信号的完全同步,实现对电网电压的锁相。
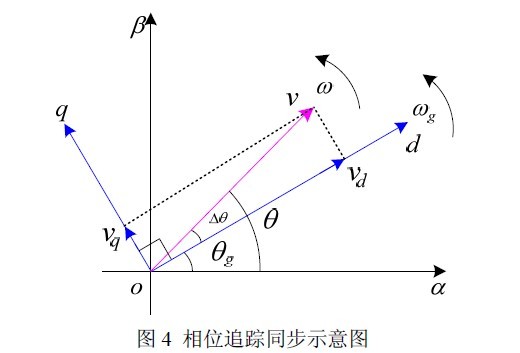
在上述电网电压锁相的基础上,微电网电压对电网电压的同步追踪过程如图4 所示。图中θg 和ωg 为大电网电压的相位和角频率,θ 和ω 为微电网母线电压的相位和角频率,Δθ 为两者之间的相位差,d-q 坐标系以电网电压角频率ωg 旋转。同步追踪过程就是通过调整微电网母线电压的角频率,使微电网母线电压和大电网电压之间的相位差Δθ 不断趋向于零。当两者完全实现同步时,应该有Δθ 等于零,此时微电网母线电压在q 轴分量上的投影为零,因此可以通过控制νq=0来实现两者的同步。
νq 可以通过对三相微电网电压按照式(9)做同步坐标变换得到,其中νoa、νob、νoc 为微电网的三相母线电压,θg 为上述三相电网电压锁相环的输出相位。
将上述变换得到的q 轴分量νq 与零参考进行PI调节,PI 调节器的输出ωsync 即为同步补偿角频率,将此同步补偿角频率与下垂控制的生成的角频率按照式(10)叠加,作为三相逆变器输出电压的参考角频率。

此外为防止预同步过程中微电网频率发生剧烈波动,影响电能质量,应对PI 调节器的输出进行限幅。
4. 仿真及实验结果
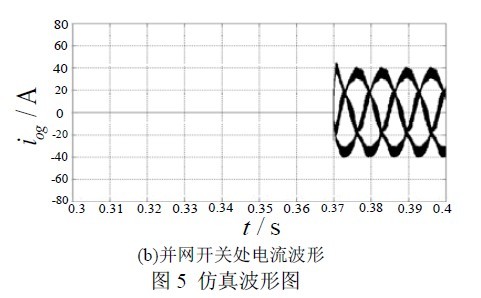
为验证上文所提并网预同步控制策略的有效性,用MATLAB/Simulink 搭建了微电网仿真模型,模型结构如图2 所示。图5 为仿真结果。图5(a) 为预同步过程中微电网电压和大电网电压的波形图,可以看出两者之间的相位差不断减小,并终实现同步。图5(b)为并网前后,并网开关处的电流波形,可以看出,在并网预同步控制的作用下,合闸时刻不存在冲击电流。

此外,搭建了以TMS320F2812 为控制器的50kVA三相微电网逆变器实验平台。系统实验波形如图6 所示。图6(a)为三相电网电压及其锁相环输出相位波形,可以看出锁相环输出相位在0 到2π 之间变化,并且能准确跟踪电网电压的频率和相位。图6 (b)为微电网电压和大电网电压的相位波形,可以看出追踪同步过程中两者之间的差值不断缩小并终趋近于0。图6 (c)为微电网和大电网两者的A 相电压波形,由图可见预同步过程中两者相位差不断缩小,并终实现同步。

5. 结论
为避免微电网并网时,由于微电网电压和大电网电压的不同步导致的并网电流冲击,本文提出的一种基于下垂控制的微电网并网预同步控制策略,通过动态调节逆变器输出电压的同步补偿角频率,实现微电网电压与大网电压的相位同步,保证了微电网由孤岛模式到并网模式的无缝切换,提高了微电网系统的安全性和稳定性。,通过仿真和实验验证了控制策略的可行性。
责任编辑:
【免责声明】
1、本文内容、数据、图表等来源于网络引用或其他公开资料,版权归属原作者、原发表出处。若版权所有方对本文的引用持有异议,请联系拍明芯城(marketing@iczoom.com),本方将及时处理。
2、本文的引用仅供读者交流学习使用,不涉及商业目的。
3、本文内容仅代表作者观点,拍明芯城不对内容的准确性、可靠性或完整性提供明示或暗示的保证。读者阅读本文后做出的决定或行为,是基于自主意愿和独立判断做出的,请读者明确相关结果。
4、如需转载本方拥有版权的文章,请联系拍明芯城(marketing@iczoom.com)注明“转载原因”。未经允许私自转载拍明芯城将保留追究其法律责任的权利。
拍明芯城拥有对此声明的最终解释权。
相关资讯
:
基于MC33771主控芯片的新能源锂电池管理系统解决方案

AMIC110 32位Sitara ARM MCU开发方案

基于AMIC110多协议可编程工业通信处理器的32位Sitara ARM MCU开发方案

基于展讯SC9820超低成本LTE芯片平台的儿童智能手表解决方案

基于TI公司的AM437x双照相机参考设计

基于MTK6580芯片的W2智能手表解决方案









 2012- 2022 拍明芯城ICZOOM.com 版权所有 客服热线:400-693-8369 (9:00-18:00)
2012- 2022 拍明芯城ICZOOM.com 版权所有 客服热线:400-693-8369 (9:00-18:00)


