



 产品分类
产品分类
WPG - 大联大推出基于豪威科技 OV7725的扫地机器人视觉系统
 77
77
 拍明
拍明
原标题:WPG - 大联大推出基于豪威科技 OV7725的扫地机器人视觉系统
大联大世平联合湖南海森格诺推出基于OV OV7725 Robeye-Pilot扫地机器人视觉系统,采用的OV OV7725摄像头感测器是一款高性能1/4英寸单芯片VGA摄像头和影像处理器,小尺寸封装。OV7725以全功能运行,在性能、品质和可靠性方面满足所有PC多媒体和摄像机市场的要求。低功耗OV7725在低光照条件下表现优异,可在-20°C至+70°C的宽温度范围内工作。
服务机器人应用范围极为广泛,如教育、娱乐、特种(安防、军用)、导购、迎宾、医疗、金融、物流、电子商务、商务秘书等。其中,家庭清洁机器人是现阶段销售数量最多、应用范围最广的一类服务机器人。扫地机器人则是家庭清洁机器人的最主要成员,市场占比达到96%以上。
Robeye-Pilot是海森格诺重点打造的品牌,具有完全自主开发的核心技术:异构混合的机器人AI视觉领域专用处理器架构VENUS、多感测器图像同步采集、矫正、拼接等预处理技术以及和机器人AI视觉应用密切相关的三大核心算法。这三大核心算法是Robeye-Pilot扫地机器人视觉系统方案的最大优势所在。
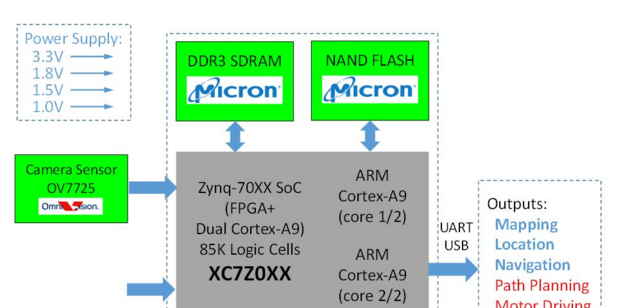
图示1-大联大世平联合湖南海森格诺推出基于OV OV7725的扫地机器人视觉系统的系统方案图功能描述
基于ARM+FPGA的异构并行处理;
光流即时跟踪帧率超过25FPS;
超过300个优异特征点跟踪能力;
图像全域统一曝光;
IMU姿态资料-图像毫秒级同步和融合定位; 基于特征检测的高精度闭环视觉定位。
图示2-大联大世平联合湖南海森格诺推出基于OV OV7725的扫地机器人视觉系统的照片重要特性
定位精度:典型应用场景下闭环控制位置精度4cm(RMSE);典型应用场景下闭环控制姿态精度0.1deg(RMSE); 定位执行延迟:图像曝光后控制输出延迟20ms; 定位刷新:最高定位刷新率100Hz;典型定位刷新率50Hz; 环境适应性:工作温度-20~+55°C;工作环境无显着震动、无腐蚀气体和易燃物品;电磁相容性符合GB4343.1 GB7625.1; 典型功耗:核心模组典型功耗小于1.5W;
核心模组尺寸:53mm*43mm*5mm;
系统定制属性:支持接入广角镜头和鱼眼镜头,支持广角镜头倾斜向上(30度); 低成本、低功耗。
责任编辑:
【免责声明】
1、本文内容、数据、图表等来源于网络引用或其他公开资料,版权归属原作者、原发表出处。若版权所有方对本文的引用持有异议,请联系拍明芯城(marketing@iczoom.com),本方将及时处理。
2、本文的引用仅供读者交流学习使用,不涉及商业目的。
3、本文内容仅代表作者观点,拍明芯城不对内容的准确性、可靠性或完整性提供明示或暗示的保证。读者阅读本文后做出的决定或行为,是基于自主意愿和独立判断做出的,请读者明确相关结果。
4、如需转载本方拥有版权的文章,请联系拍明芯城(marketing@iczoom.com)注明“转载原因”。未经允许私自转载拍明芯城将保留追究其法律责任的权利。
拍明芯城拥有对此声明的最终解释权。
相关资讯
:
BAT剑指科大讯飞,能否让其重蹈Nuance覆辙?

三星在中国一面撤资,一面增资是为何?

半导体激光治疗仪是骗局吗?

2016全球十大电子元器件分销商排行榜

2016年10大全球电子元器件代理商排行一览表

STM32学习笔记:通用定时器基本定时功能









 2012- 2022 拍明芯城ICZOOM.com 版权所有 客服热线:400-693-8369 (9:00-18:00)
2012- 2022 拍明芯城ICZOOM.com 版权所有 客服热线:400-693-8369 (9:00-18:00)


